2020 ROS Middleware Evaluation Report
November 5, 2020
Prepared by: Katherine Scott, William Woodall, Chris Lalancette
Index
- Introduction
- Executive Summary
- Build Farm Performance Metrics
- Mininet Simulation Results
- WiFi Results
- REP-2004 Code Quality Metrics
- GitHub User Statistics
- User Survey Results
- Appendix
Introduction
This report is intended to serve as a guide for the selection of the default ROS middleware (RMW) implementation for the ROS 2 Galactic Geochelone release. This report is intended to provide information about the qualifying Tier 1 RMW implementations along two broad axes of evaluation: application performance and community engagement. This report is intended to be purely informational and non-prescriptive; meaning this report does not make a recommendation for the default middleware. Instead, it is an attempt to present objective data about the default RMW candidates in a neutral and factual manner. The final default ROS 2 Galactic middleware implementation will be selected by the ROS 2 Technical Steering Committee (TSC) after evaluation by both the ROS 2 Middleware Working Group and the TSC.
In order to be considered for this report, middleware implementations needed to meet a minimum bar:
- It is considered a Tier 1 implementation in REP-2000
- It, and the middleware it depends on, are open-source projects under a permissive license
- It is based on a middleware that uses RTPS or is a DDS implementation
Two rmw implementations currently meet this minimum bar: rmw_cyclonedds_cpp based on Cyclone DDS and rmw_fastrtps_cpp based on Fast RTPS.
From here on out, Cyclone DDS will be used synonymously with rmw_cyclonedds_cpp and Fast RTPS will be used synonymously with rmw_fastrtps_cpp unless otherwise specified.
This report evaluates these two DDS implementations along with their RMW implementations for ROS 2, namely Cyclone DDS and Fast RTPS (this is now called Fast DDS, but this report will continue to refer to it as Fast RTPS). These two Tier 1 ROS 2 RMW implementations along with the underlying DDS implementations are evaluated along two broad rubrics: application performance, as in the overall computational performance of the RMW, and community engagement, or how the RMW’s users perceived the utility of the RMW for their application. These two broad categories of evaluation are supported by the analysis of some recently collected datasets. The datasets collected and how they were analyzed are summarized below:
- Build Farm Performance Data – this dataset covers basic RMW performance in terms of memory, cpu utilization, and lost messages using a simplified network under optimal conditions.
- Mininet Performance Data – this data set is an initial attempt to evaluate RMW performance under simulated real-world conditions. It attempts to understand what conditions cause each RMW to fail.
- WiFi Performance Data – this data set is an attempt to evaluate RMW performance in real-world scenarios using WiFi. It attempts to determine how each RMW behaves in cases where available bandwidth limits are reached.
- REP-2004 Code Quality Data – this simple table presents the REP-2004 code quality standards as implemented for both the RMW and underlying DDS implementation.
- GitHub Engagement Data – this section looks at GitHub community engagement data over the preceding six months for both the RMWs and DDS implementation.
- User Survey Data – this section presents the results of a survey of the ROS 2 community asking them about the overall end-user experience.
In collecting these datasets we made our best effort to use the most recent version of each RMW; but in many cases, particularly with outside parties, there was some variation in the implementation under test. As such, it is important to understand that these data do not represent a single snap-shot in time of each RMW implementation; instead they represent a more holistic evaluation of performance over the preceding six months. It is also important to note that many of these values may shift in the future based on implementation updates. Moreover, fixating on or overweighting a single metric in the evaluation of the RMW implementations could lead to poor outcomes, as the underlying tests are imperfect representations of the real world. This is to say that the data collected for this report are merely an imperfect sample of a moving target. Finally, please keep in mind that this report is geared towards selecting the default ROS 2 RMW. As shown by the data, most ROS users are perfectly content to change the default RMW if it addresses their use case. The core use-case for the ROS 2 RMW is as the starting point for new ROS adopters; and as such a preference should be given to the needs of this group of individuals.
Where possible we will provide the underlying data and source code for both experimentation and analysis. This process is intended to be repeated for each subsequent ROS 2 release and our hope is that it can become more automated and also serve as a community resource for selecting the best RMW for each user’s specific needs.
Executive Summary
This section will attempt to summarize the most important parts from each of the sections in this report.
In Section 1, the plots in 1.2.1 and 1.2.2 show an advantage for Cyclone DDS, but since it only includes spinning without any publishers or subscriptions, it serves as only a baseline comparison for their memory and CPU footprint.
Also in Section 1, plots in 1.2.3 show Fast RTPS with synchronous publishing to be the best implementation, having the same shape to the curve as message size increases, but with a better score in each case. Note, these plots show only a single run of the performance tests each, as they come from a single night of the nightly performance jobs. They also show clear trade-offs between synchronous and asynchronous publishing modes.
In Section 2, there is a summary of the difference in asynchronous and synchronous publishing behavior and performance, mostly in 2.1 and its subsections. It concludes that comparing Fast RTPS’s default behavior, which is using asynchronous publishing, to Cyclone DDS’s default behavior, which is using synchronous publishing, is not a fair comparison. It uses data from the Mininet experiments to demonstrate how asynchronous publishing is different from synchronous publishing, and it also highlights comparisons between Fast RTPS using synchronous publishing, which is done with special configuration, and Cyclone DDS which is always using synchronous publishing.
Also in Section 2, while the Mininet tests are imperfect they are the best tool at our disposal for creating controlled tests for each RMW, and our ability to run the results multiple times gives us confidence that the results are repeatable. Using the Mininet simulator we were able to push each RMW to the breaking point. Our results indicate that Cyclone DDS sync had lower latency and fewer lost messages in adverse networking conditions. There were multiple cases where Cyclone DDS sync was the only RMW to deliver messages (albeit very few of them). Moreover, we found that Cyclone DDS sync also had a slightly smaller memory footprint with a slightly better CPU profile in most cases.
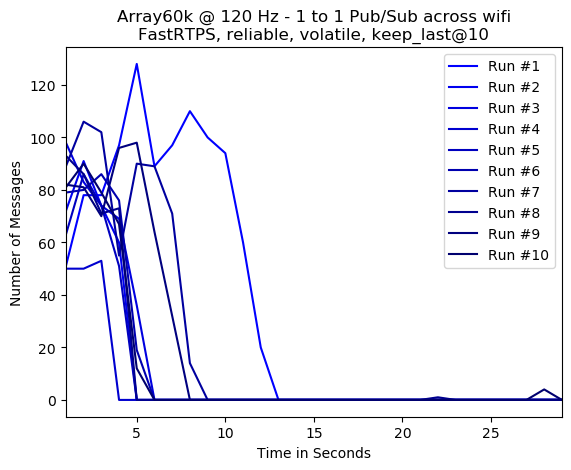
In Section 3, we present observations from “real life” WiFi testing, and demonstrate that both implementations started to suffer significant performance issues, in terms of message delivery, at similar publishing frequencies, i.e. between 80Hz-100Hz with an Array60K message. There was not an obviously better implementation in this experiment. See Section 3 for more details of the experiment.
In Section 4, data from GitHub about the two vendor’s repositories is compared, and we see similar results. Issues are handled in a timely fashion for the most part, and those that are not could be special cases. It is difficult to draw a meaningful conclusion from the data available.
In Section 5, adherence to REP-2004 is compared, and the only significant thing to note is that Cyclone DDS does not have its own Quality Declaration, but the Cyclone DDS repository does have one, which is apparently an oversight. Otherwise the implementations are quite similar, despite some inconsistencies in the reporting due to differences in self reporting. Cyclone DDS is missing a quality declaration making it difficult to perform an apples to apples comparison between the two. Under most of the categories for the parts that are documented each implementation are comparable. Despite this there is an appreciable difference as Cyclone DDS is currently declared as quality level 3, and Fast RTPS is rated as quality level 2.
In Section 6, the user survey results are presented, and there is a slight advantage for Cyclone DDS as highlighted in the plots for section 6.2.5. There are potential sources of bias which may affect this result due to the fact that it relies on self reporting. Generally speaking, Cyclone DDS Sync users are more likely to recommend Cyclone DDS be used as the default RMW and recommend Cyclone DDS to a friend. It is worth noting that Section 6, users of all levels who submitted to the survey felt comfortable switching rmw implementations.
1. Build Farm Performance Metrics
1.1 Overview and Description
The first dataset collected for evaluating RMW performance comes by way of the ROS build farm. The ROS build farm hosts a collection of small integration tests that verify that a given RMW Implementation performs acceptably when connected to either a single ROS node or a single ROS publisher sending messages to a single ROS subscriber. Within the build farm there are also interoperability tests that examine the transport of messages between pairs of RMW/DDS implementations; however these tests are outside of the scope of this report. For this section of the report we looked at the performance of three different testing regimes:
- A single, spinning, ROS node backed by an DDS/RMW pair and instrumented to collect general performance data like mean and median CPU and memory consumption.
- A publisher subscriber pair where the publisher and subscriber each use a different RMW implementation. These tests are instrumented to collect basic load statistics like CPU and memory utilization. These tests are presently outside the scope of this report, but the results are available in the included Jupyter notebooks.
- A ROS publisher and subscriber pair sending messages of varying sizes and instrumented to collect both host load statistics and network performance statistics.
All metrics for this portion of the report were collected using a custom performance metrics tool. The Python Jupyter notebooks for pre-processing the data and plotting data can be found respectively BuildFarmDataProcessing.ipynb and BuildFarmPlots.ipynb. The post processed data can be found in the buildfarm subdirectory.
1.2 Build Farm Test Results
The first set of data collected involved running a single, perpetually spinning ROS node a short time and collecting the peak, mean, and median, CPU and memory utilization statistics. The figures below summarize the results for both the Cyclone DDS RMW and Fast RTPS RMW in the asynchronous configuration. Full plots of all the RMW variants and configurations are available in Appendix A. The data for these plots was collected on October 14th 2020 as indicated by this build farm log. The full data set can be downloaded using this link. Summarized csv files can be found in the data directory for the build farm test results. Figure 1.2.1 provides the CPU performance while Figure 1.2.2 provides the memory performance including virtual, resident, and physical memory allocation. Links to the source code for this test along with the analysis are available in the appendix.
A second bevy of tests were run using a single publisher and a single subscriber communicating across a host machine while varying both the underlying RMW as well as the message size. The publisher and subscriber were instrumented to collect both system performance metrics and transmission metrics. We have selected a few illustrative examples from the set to share including subscriber CPU versus message size, messages received versus message size, and message latency versus message size in figures 1.2.3, 1.2.4, and 1.2.5 respectively.
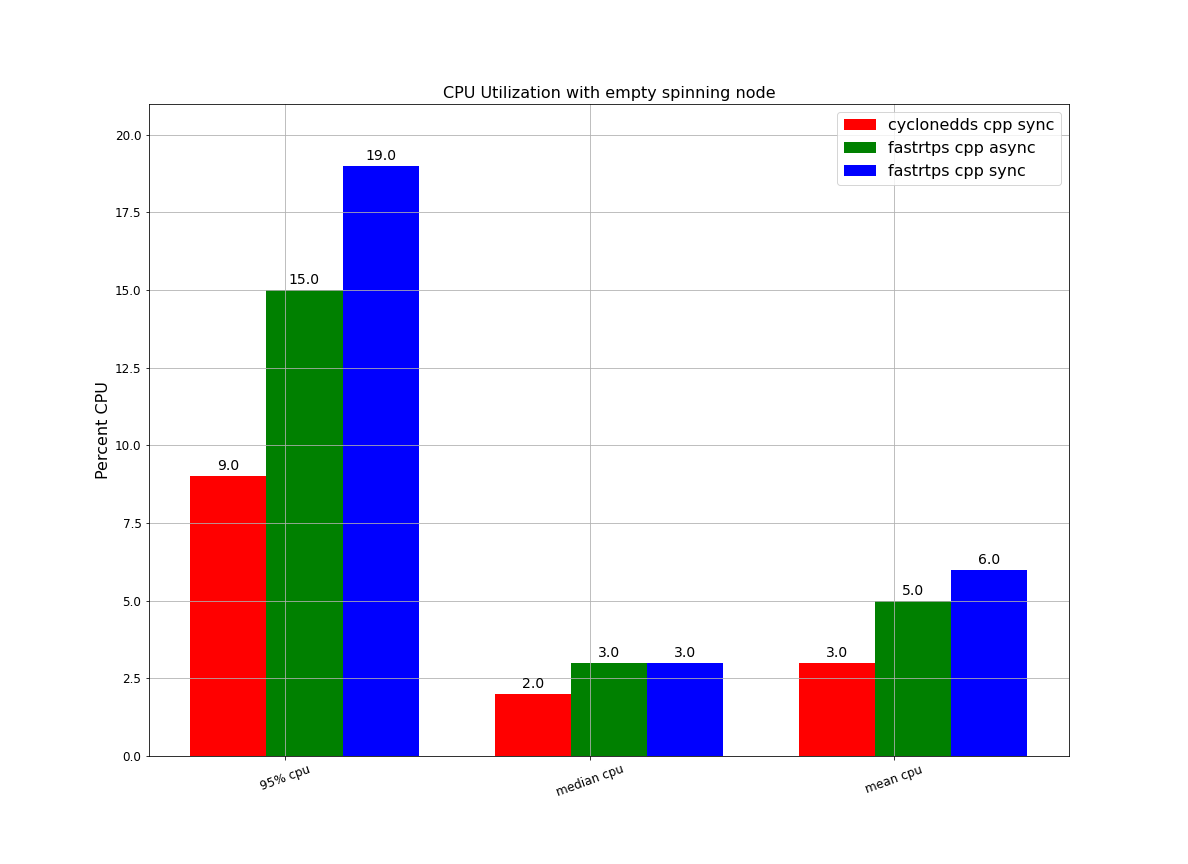
1.2.1 CPU Utilization in a Spinning Node By RMW
This plot shows the CPU usage of a single, empty spinning node. The node being empty means that it has no publishers, subscribers, services, actions, or timers attached. Thus, this is a test of just the overhead of a node. The 95% CPU measurement indicates the 95% percentile (i.e. peak) CPU utilization of the node.
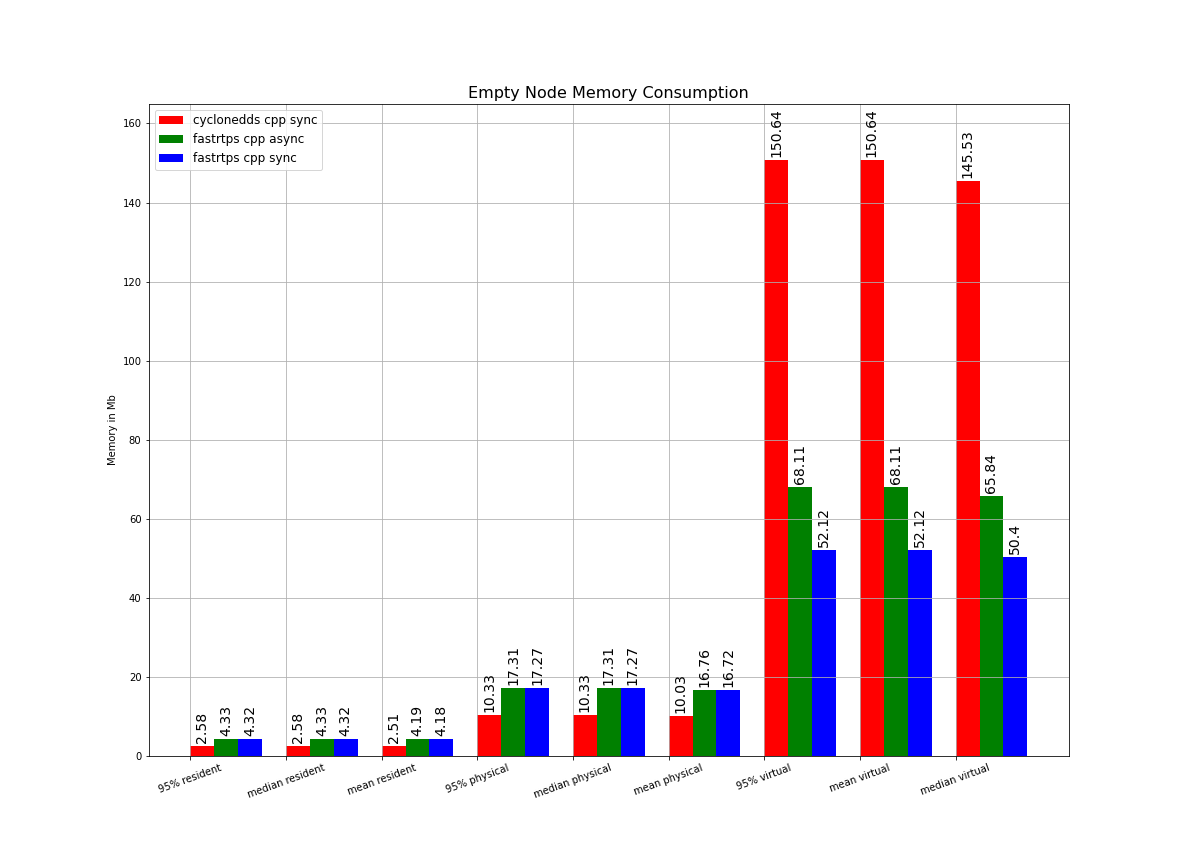
1.2.2 Memory Utilization in a Spinning Node By RMW
This plot shows the memory usage of a single, empty spinning node. The node being empty means that it has no publishers, subscribers, services, actions, or timers attached. Thus, this is a test of just the overhead of a node. The 95% memory measurement indicates the 95% percentile (i.e. peak) memory utilization of the node.
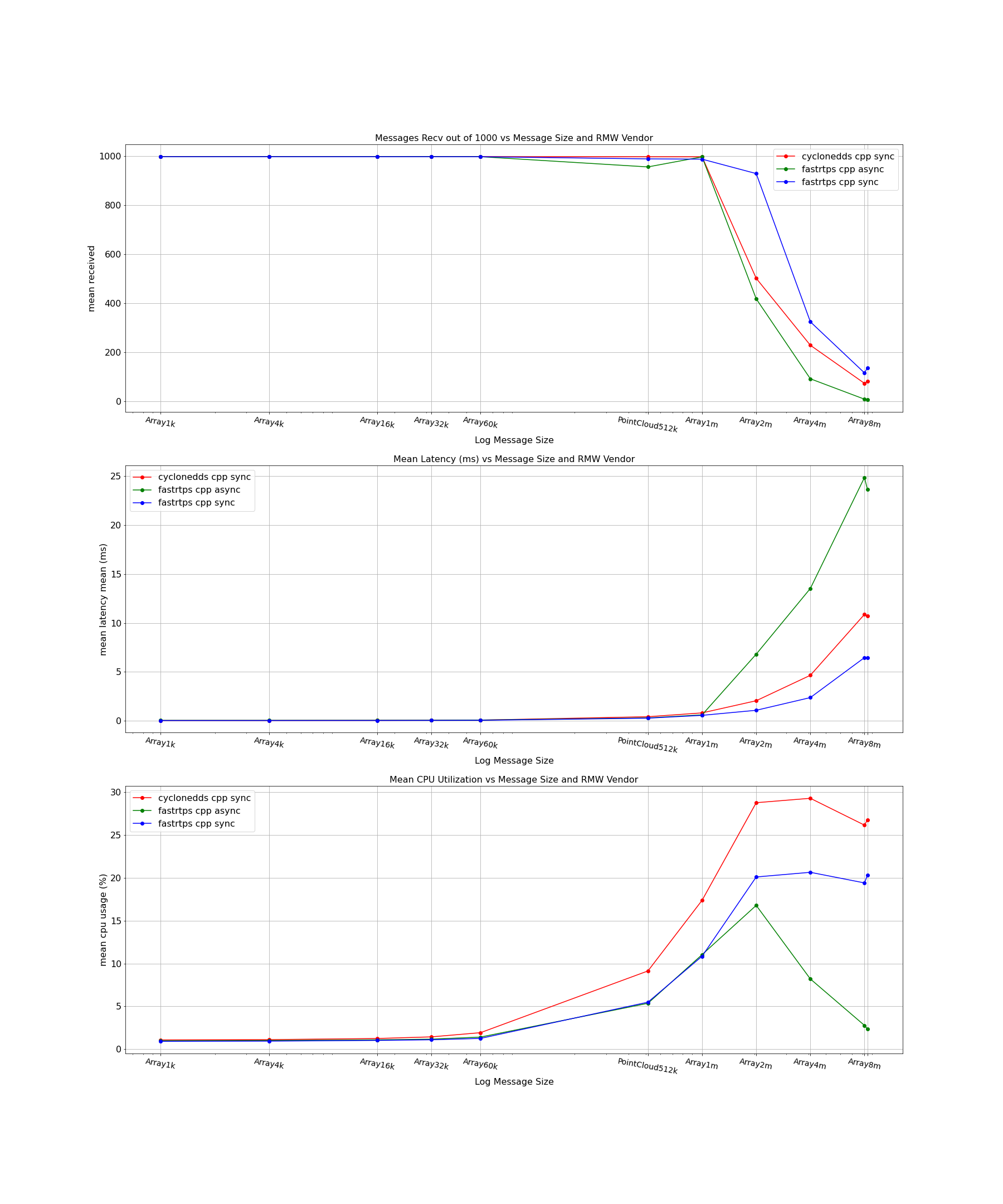
1.2.3: Subscriber CPU Utilization, Latency, and Lost Messages By Message Type and RMW
In this plot, 1000 messages of the specified size were sent between a publisher and subscriber on the same machine. For each message size, the above plots show how many messages out of 1000 were received by the publisher, the average latency to receive each of the messages, and the average CPU utilization to receive the messages. For this plot, Quality of Service options of best-effort, keep last, and a depth of 10 were used.
1.3 Build Farm Test Discussion
The results between the two RMW implementations were reasonably close, particularly in light of other RMW implementations visible on the build farm. In terms of CPU and memory utilization Cyclone DDS RMW performed slightly better. In terms of message latency and messages received both vendors appear to perform well up until approximately the 1MB message size. For messages greater than ~1MB Cyclone DDS RMW has better results with lower latency and the number of messages sent.
2. Mininet Simulation Results
In this section, we present some details of experiments made using Mininet to simulate degraded network conditions.
The priority of this section and these experiments is to highlight interesting differences in either the rmw implementations or settings that can be changed within those implementations.
The full report and data can be found here: Appendix B
2.1 Synchronous Versus Asynchronous Publishing
There is a significant difference in both performance and behavior when using asynchronous publishing versus synchronous publishing. Also, there is currently an asymmetry in the default behavior of Fast RTPS and Cyclone DDS on this point. To provide a clear result we have produced results for both the synchronous and asynchronous variants of Fast RTPS along with results for Cyclone DDS.
2.1.1 Overview
Briefly, the different modes dictate how publishing data is handled when the user calls something like publish(msg).
In asynchronous publishing, the publish call puts the message on a queue and some significant part of sending it to remote subscriptions is done in a separate thread, allowing the publish call to return quickly and generally spend a more consistent amount of time in the publish call, especially when publishing large data where serialization, sending to the network, and other tasks could take a significant amount of time.
In synchronous publishing, the publish call does much more of the work to send the message to the network within the publish call, which is often more efficient and lower latency, but can cause issues with throughput when publishing large data and can cause the publish call to block longer than might be expected.
2.1.2 Current Situation
Currently Fast RTPS uses asynchronous publishing by default, but it also supports synchronous publishing as well. Cyclone DDS uses synchronous publishing, and does not support asynchronous publishing, this was reported in this issue.
A proposal was made to change Fast RTPS to use synchronous publishing by default, but it was rejected by request of the ROS 2 core maintainers (see this pull request).
It is possible to change Fast RTPS to use synchronous publishing using non-portable environment variables and a custom XML configuration file, which is what is used in these experiments to generate the Fast RTPS sync results, versus the Fast RTPS async results which use the default settings.
2.1.3 The Possible Options
This change in behavior was blocked, in part, to avoid breaking behavioral changes between ROS distributions, i.e. one version is using async by default, and the next is using sync by default. However, with the TSC approval, we could allow Fast RTPS to default to synchronous publishing, which would be a break in default behavior, but would bring it in line with how publishing works with Cyclone DDS.
Deciding to switch the default to Cyclone DDS is implicitly making this change in default behavior, from Fast RTPS with asynchronous publishing to Cyclone DDS with synchronous publishing.
Therefore there are three related possible outcomes from this process:
- Do nothing, keep Fast RTPS as the default, keep asynchronous publishing as the default.
- Switch to Cyclone DDS as the default, implicitly changing the publishing behavior to synchronous in the process.
- Stick with Fast RTPS, but change the default publishing mode to synchronous.
2.1.4 Improvements to ROS 2
Ideally we would have a portable way in the ROS 2 API for users to choose which publishing mode they want. We should add this, but it still does not address the issue of which settings to use by default, and whether or not to breaking existing behavior by changing Fast RTPS to synchronous publishing by default.
2.1.5 Performance and Behavior Differences
In this subsection, we will motivate why this setting matters so much and should be considered when comparing the “out-of-the-box” behavior of Fast RTPS and Cyclone DDS, and why we should be careful when considering switching the default setting for users.
2.1.5.1 Impact on Performance
Asynchronous publishing can have a positive impact on throughput when publishing large data where fragmentation is involved.
This report doesn’t have very good data supporting this point, but one of the purposes of this feature is to provide better performance when publishing large messages or streaming video, see Fast RTPS’s documentation as an example.
Also this graph from the build farm’s performance dataset show how CPU utilization falls off for very large messages, even though messages received is lower than synchronous in this example:
It is likely that customization of a flow controller is also required to get the optimal large data performance when used with asynchronous publishing.
Aside from the potential benefits of asynchronous publishing in certain situations, it is clear that comparing synchronous publishing in Cyclone DDS with asynchronous publishing in Fast RTPS is not a fair comparison. The “Messages Recv” part of the graph above demonstrates this, by showing that the sync mode for the two implementations have the same curve shape and are close in performance, whereas the asynchronous mode diverges from the other two.
2.1.5.2 Impact on Publish Behavior
In a situation where the bandwidth required for publishing exceeds the available bandwidth you can observe a difference in publish blocking behavior. We emulate this situation by using Mininet to limit the bandwidth artificially.
To illustrate this difference in behavior consider this experiment case:
- a single publisher publishing a “PointCloud512k” at 30Hz to a single subscription in a separate process,
- using the QoS:
- reliable,
- volatile, and
- keep last with a history depth of 10, and
- using Mininet to limit the bandwidth to 54Mbps.
This case is interesting because the required bandwidth exceeds the limit imposed by Mininet, i.e. the message is roughly 512 kilobytes being published at 30Hz, so a rough calculation is that it would require 122Mbps to transmit all of the data (not including the overhead of transport or resent data). In this scenario, a backlog of messages is produced and the history cache is full in the first few seconds of publishing. To understand this point, it is also important understand how the “Messages Sent” is calculated by the publishing process. Each time a message is published, a time stamp is recorded, the remaining time until the next publish period is calculated and the publishing thread sleeps until that time has elapsed before publishing again. Therefore if publishing takes a long time it can begin to impact the effective publish rate.
Consider these two series of plots comparing Fast RTPS sync and Cyclone DDS sync with varying packet loss:
| Cyclone DDS sync | Fast RTPS sync | |
| Packet Loss: 0% |

|

|
| Packet Loss: 10% |

|

|
| Packet Loss: 20% |

|

|
| Packet Loss: 30% |

|

|
| Packet Loss: 40% |

|

|
As you can see, the publishing rate does not meet the target of 30 per second, but are fairly consistent between the two implementations. An oddity is that as the packet loss increases, the effective publishing rate increases as well, approaching the desired rate of 30. Note that these plots show both individual runs (with reduced alpha) and averages of those 10 runs (solid lines). The dotted lines are averages rates for the entire run.
Now consider these two series of plots between Fast RTPS async and Fast RTPS sync:
| Fast RTPS async | Fast RTPS sync | |
| Packet Loss: 0% |

|
|
| Packet Loss: 10% |

|
|
| Packet Loss: 20% |

|
|
| Packet Loss: 30% |

|
|
| Packet Loss: 40% |

|
|
Notice in the async case that the publish rate almost achieves the desired 30Hz, whereas the publish rate for sync is clamped to the capacity of the network almost immediately. The publish rate for async is quite noisy, which is something we could investigate further, but the average is quite close the desired goal. This can be a very serious issue if the user’s code is designed under the assumption that publishing is always relatively quick, which is a likely assumption for ROS 1 users (ROS 1 behaved most similarly to asynchronous publishing in ROS 2) or for users thinking that “keep last” will just replace messages in the history cache if there’s a backlog. We can document this behavior, but the impact is quite subtle and could lead to hard to diagnose problems in user’s applications. This example was intended to demonstrate why it is important to be cautious when changing this behavior for all users.
2.2 Mininet test results
2.2.1 Experiments with Lost Packets or Latency at 54Mbps Bandwidth
This plot shows several poorly performing cases with the Mininet bandwidth set at 54Mbps. To generate these plots we first took the average value across a single Mininet experiment and then averaged that value across ten Mininet runs (i.e. first average the time series, then take the average of the ten runs). When calculating latency we first examined the number of packets received for a given time slice, and then, if a packet was received in a time slice we then calculate the average latency for that time slice. Each label across the X-axis describes the simulated packet loss percentage and the size of the message. For example, “L:0/PointCloud512k” shows the results from simulating 0% packet loss with a 512k message size and 54Mbps bandwidth cap. The top plot shows the mean latency to receive the messages, while the bottom plot shows what percent of the messages were lost. It should be noted that only poorly-performing cases are illustrated here; see Appendix B for all of the data, including the successful ones. For this plot, Quality of Service options of reliable, keep last, and a history depth of 10 were used. The black error bars indicate the maximum and minimum value in the ten runs performed for a given experiment. The notebook for data processing can be found here, while the processed data can be found in MininetResults.csv.
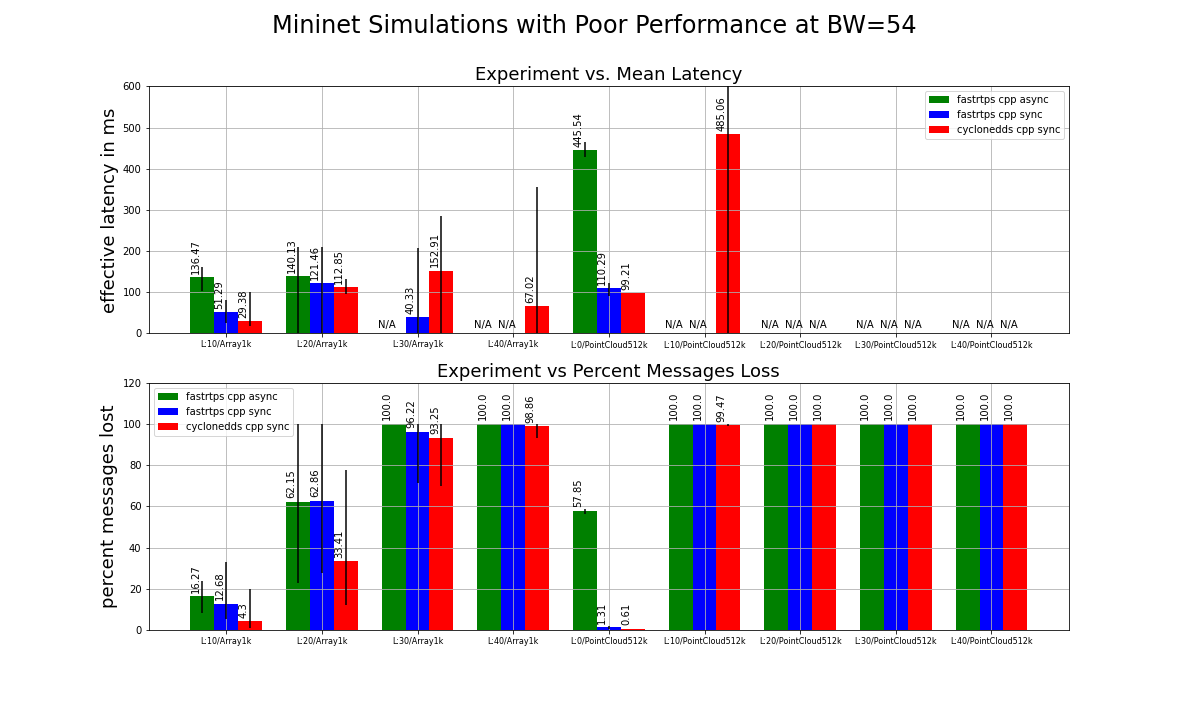
In this plot we can see three cases where no RMW successfully transmitted any messages, two cases where only Cyclone transmitted a message (with varying degrees of latency), and four cases where all the RMWs under test transmitted messages. For the four cases where all RMWs transmitted messages Cyclone generally had lower latency and more messages delivered (e.g. L10/Array1k, L20/Array1k, L0:PointCloud512k).
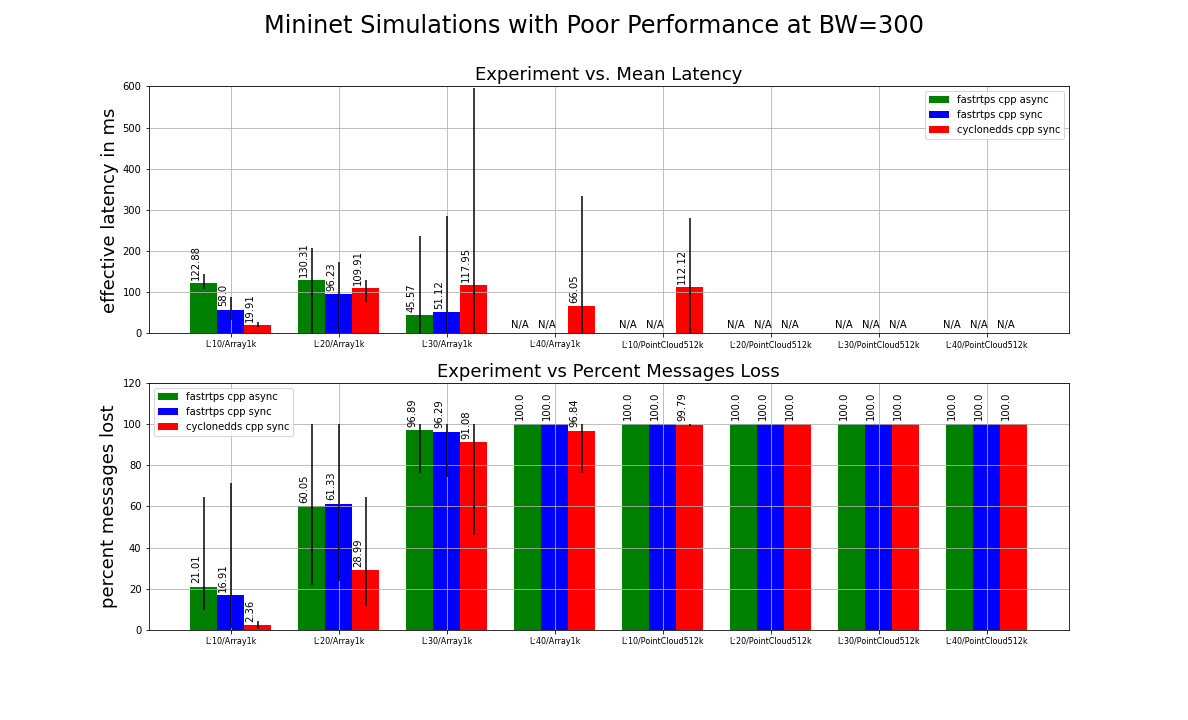
2.2.2 Experiments with Lost Packets or Latency at 300Mbps Bandwidth
This plot shows several poorly performing cases with the Mininet bandwidth set at 300Mbps. The rest of the description in 2.2.1 applies to this plot as well. In this plot we see three cases where all RMWs failed ( L20,30,40/PointCloud512k), two cases where Cyclone was able to deliver a small number of messages (L40/Array1k and L10/PointCloud512k), and three cases where all RMWs were able to deliver some messages. In the cases where all three RMWs delivered messages Cyclone generally delivered more messages but only had lower latency in one of those cases (L10/Array1k).
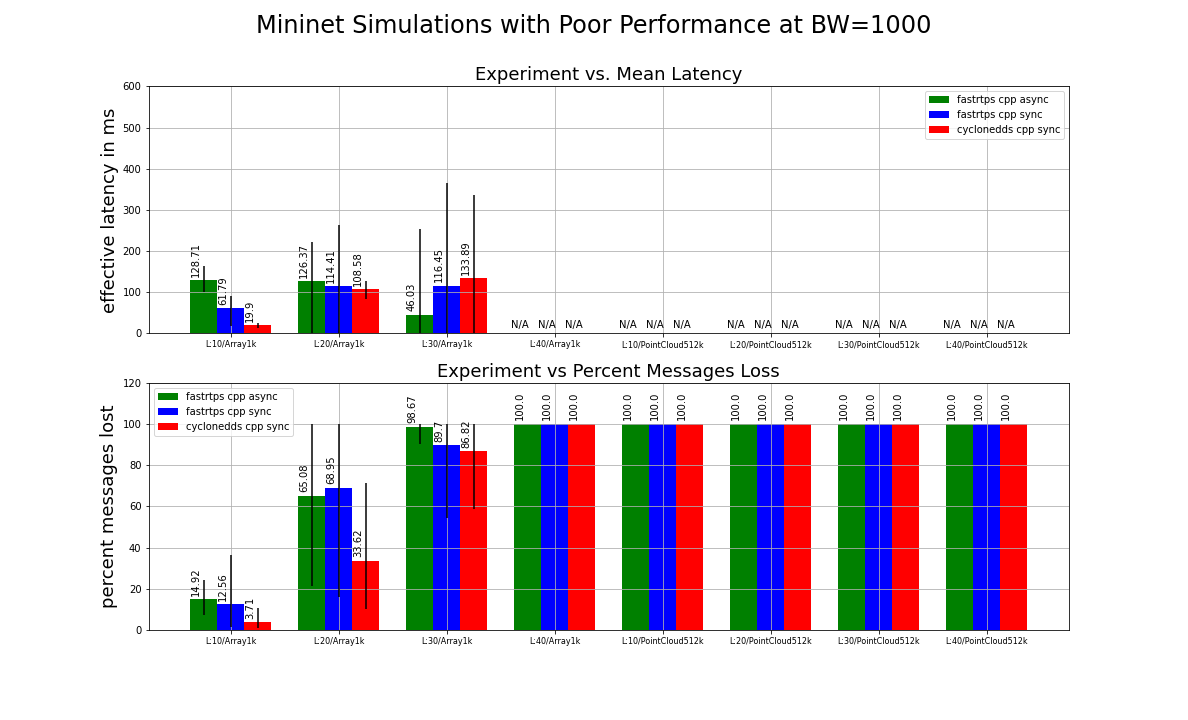
2.2.3 Experiments with Lost Packets or Latency at 1000Mbps Bandwidth
This plot shows several poorly performing cases with the Mininet bandwidth set at 1000Mbps. The rest of the description in 2.2.1 applies to this plot as well. On the right of this plot we see five cases where no messages were delivered, and three cases where all RMW vendors were able to transmit some number of messages. In these cases Cyclone had more messages delivered and lower latency in two of the cases.
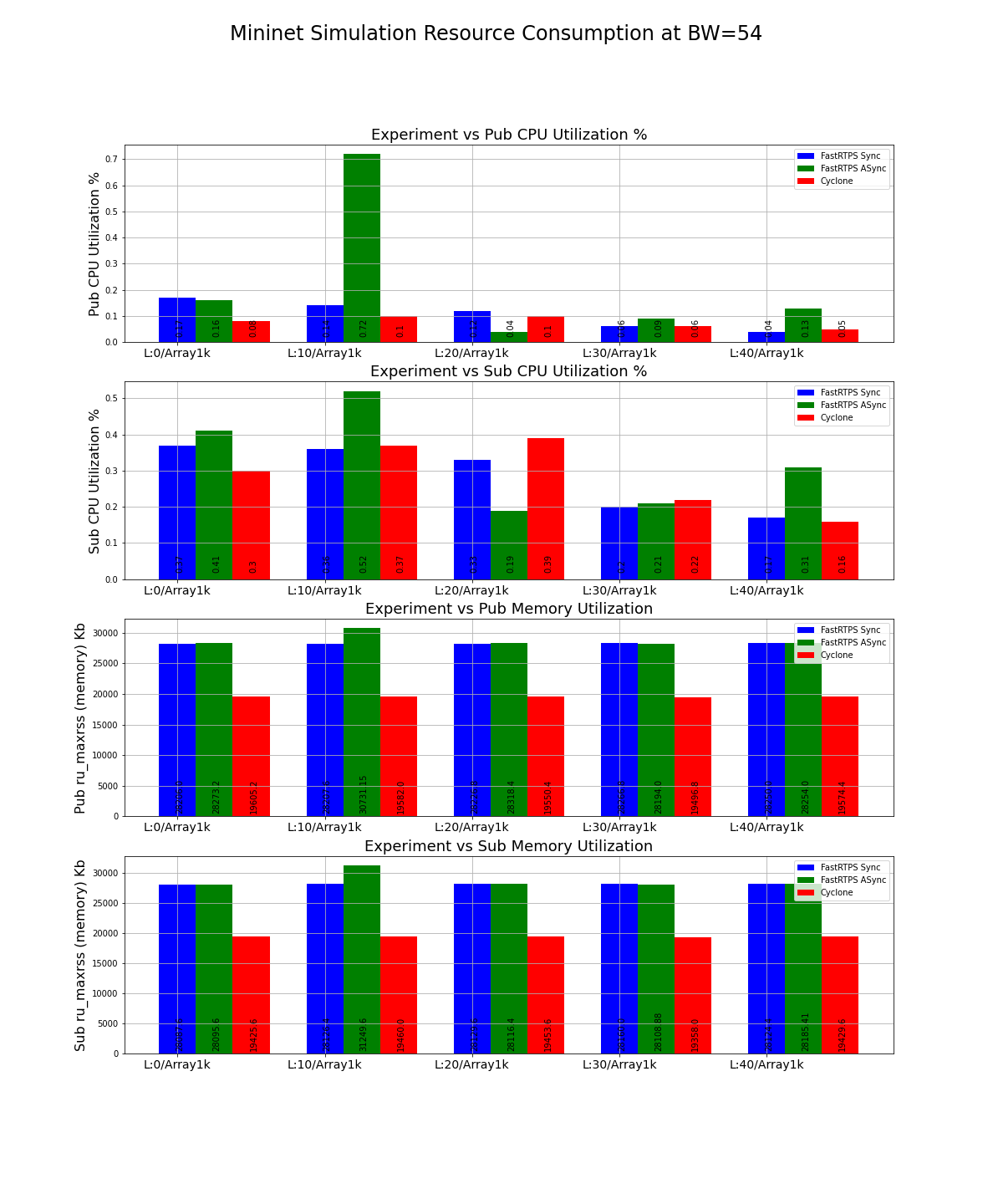
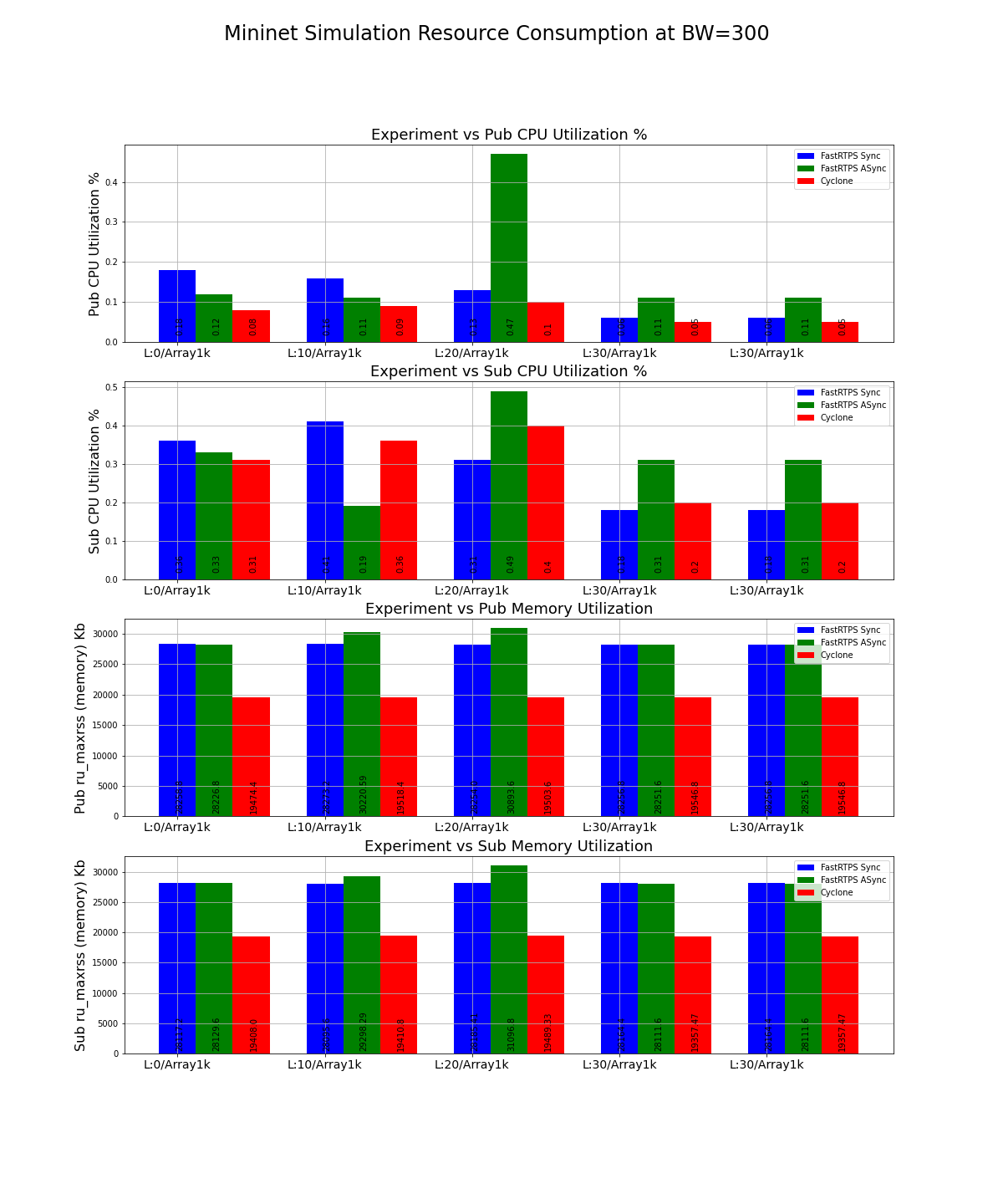
2.2.4 Publisher and Subscriber Memory and CPU Consumption for Select Experiments
The plots below gives the average of ten Mininet experiments for both memory and CPU consumption broken down by publisher and subscriber. As with all of the Mininet experiments Quality of Service options of reliable, keep last, and a history depth of 10 were used. We have chosen to include two of the resource consumption plots pertaining to the cases that most often demonstrated sucessful message transmission. These two plots used the configuration where the network bandwidth was limited to 54Mb or 300Mb and a message of size Array1k was used as the payload. The results are fairly representative; with no clear winner in terms of CPU consumption, and slightly better memory consumption across the board for Cyclone DDS sync. The CPU results should also be considered with respect to the latency and lost numbers in the previous plots. Experiments with packet loss rates above 20% with Array1k message size generally have no or few messages received. The complete set of bandwidth and message size permutations are available in Appendix B. The notebook for data processing can be found here, while the processed data can be found in MininetResults.csv.
2.2.4.1 Memory and CPU Utilization At Bandwidth = 54Mb with Message Type Array1k
2.2.4.1 Memory and CPU Utilization At Bandwidth = 300Mb with Message Type Array1k
2.3.1 Mininet Results Summary
While the Mininet tests are imperfect, they are the best tool at our disposal for
creating controlled tests for each RMW, and our ability to run the results
multiple times gives us confidence that the results are repeatable. At best
these Mininet tests allow us to establish an upper bound on
performance. Out of the 30 experimental configurations
(permutations of
Loss=[L00,L10,L20,L30,L40], Bandwidth=[54,300,1000], MessageType=[Array1k,PointCloud512k])
in only five cases did all vendors have acceptable latency and message loss
(BW54-L00-Array1k, BW300-L00-Array1k, BW300-L00-PointCloud512k,
BW1000-L00-Array1k, BW1000-L00-PointCloud512k). In all of these cases packet
loss was set to zero. Of the twenty-five remaining cases with performance degradation, eleven showed zero message
transmission, and four only had a small percentage of messages sent by Cyclone DDS
sync (between 0.5% and 7%, see BW54-L10-PointCloud512k as an example). Of the
ten cases where messages were sent with degraded performance Cyclone DDS sync
generally had fewer messages lost in all of these cases
(e.g. BW54-[L10,L20,L30]-Array1k). In sixty percent of these cases Cyclone DDS sync
also generally had lower latency (see BW54-L10-Array1k, BW54-L20-Array1k,
etc). In terms of performance under adverse networking conditions Cyclone DDS
sync generally performed better overall.
Similarly to our latency and message loss experiments, the plots in 2.2.4 indicate that Cyclone DDS sync has a smaller memory footprint for both the publisher and subscriber. The CPU performance for both publisher and subscriber are less clear; and before looking at the raw values one should condition that value on the number of messages being sent successfully. Generally in the cases where messages are sent successfully Cyclone DDS sync has lower CPU consumption.
3. WiFi Results
3.1 Test scenario
To test the performance and behavior in a real world scenario we tested the communication over a home WiFi router. For this test two laptops were used which were connected to a 2.4 GHz network provided by an ASUS RT-AC86U home router. The goal was to push the transmitted bandwidth to the limit and observe the performance and behavior of the RMW implementations since this was a common pain point reported by users.
A single topic with Array60k messages was used with the following QoS settings:
- Reliability: reliable
- History: keep latest with a queue depth of 10
3.2 Test invocation
On each side the perf_test executable from the performance_test package was invoked with the following configuration:
- The environment RMW_IMPLEMENTATION was set to the RMW implementation
- The option -c ROS2 to test the RMW implementation rather than the native API
- The option -t Array60k for the specific message type to send / received
- The option –max_runtime 30 to run the publisher / subscriber for 30s
- The option –ignore 1 to ignore the first second of statistics
- The option –reliable –keep_last –history_depth 10 to configure the QoS
- The option -s 0 for the publisher / -p 0 for the subscriber
- The option -r 80 / -r 100 / -r 120 for the publishing frequency in Hz
-
Piping the result into a file with the following pattern: <RMW>-<SIDE>-<FREQ>-<RUN>.txt
- <RMW>: either f for Fast RTPS or c for Cyclone DDS
- <SIDE>: either p for the publisher side or s for the subscriber side
- <FREQ>: the frequency in Hz which was either 80, 100, or 120
- <RUN>: the index of the run, which we performed 10 of each
The output of all test runs can be found here.
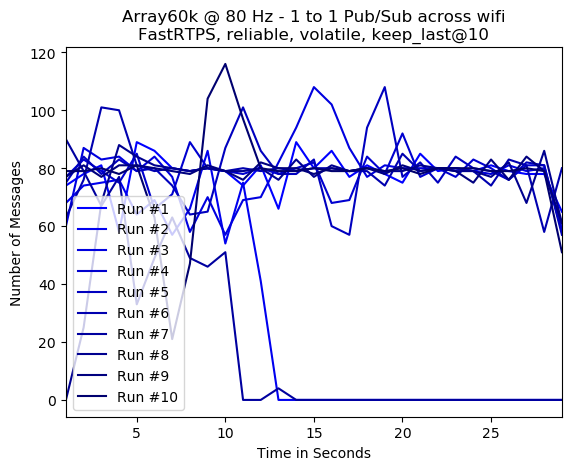
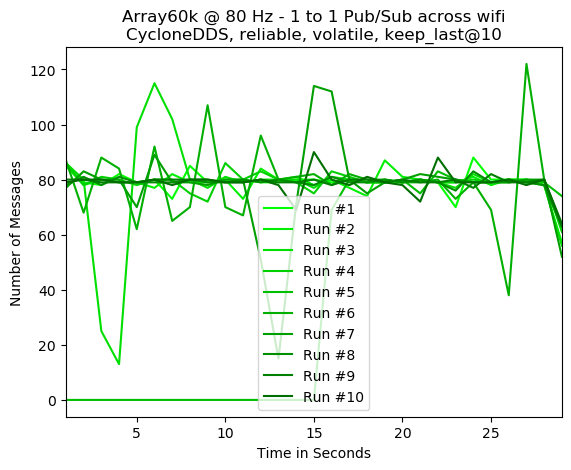
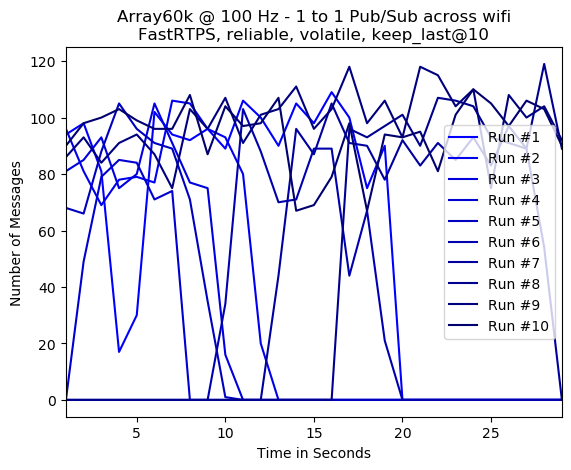
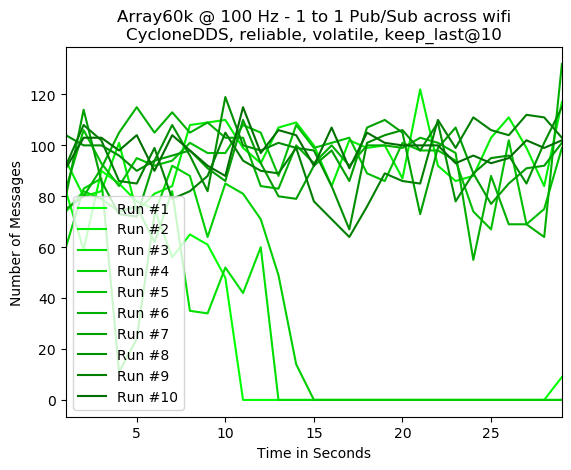
3.3 Test results
| Fast RTPS | Cyclone DDS |
|---|---|
 |
 |
 |
 |
 |
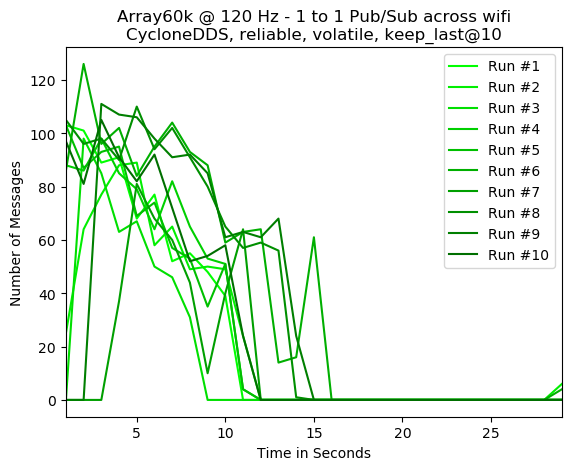 |
3.4 Test summary
The user expectation is that when the bandwidth limit is reached that less messages are being received than published. But for both tested RMW implementations the higher frequency tests show that after messages are received initially after some time no more messages are being received anymore.
4. GitHub User Statistics
4.1 Overview and Statistics
Responsiveness to issues and pull requests in a GitHub repository is a good proxy measurement for how quickly a given vendor responds to their customers and users. The number of pull requests, and how quickly they are closed, can also give us an indication to how much development is taking place on a given code base and how quickly issues are being resolved. To examine the responsiveness and development velocity of both RMW vendors we used the github API to collect commit, pull request, and issue data for the 180 days before the report was drafted on 10/17/2020. The process of collecting this data was divided into two part, data collection which can be found in this notebook, and data analysis which can be found here.
4.2 GitHub Engagement Results
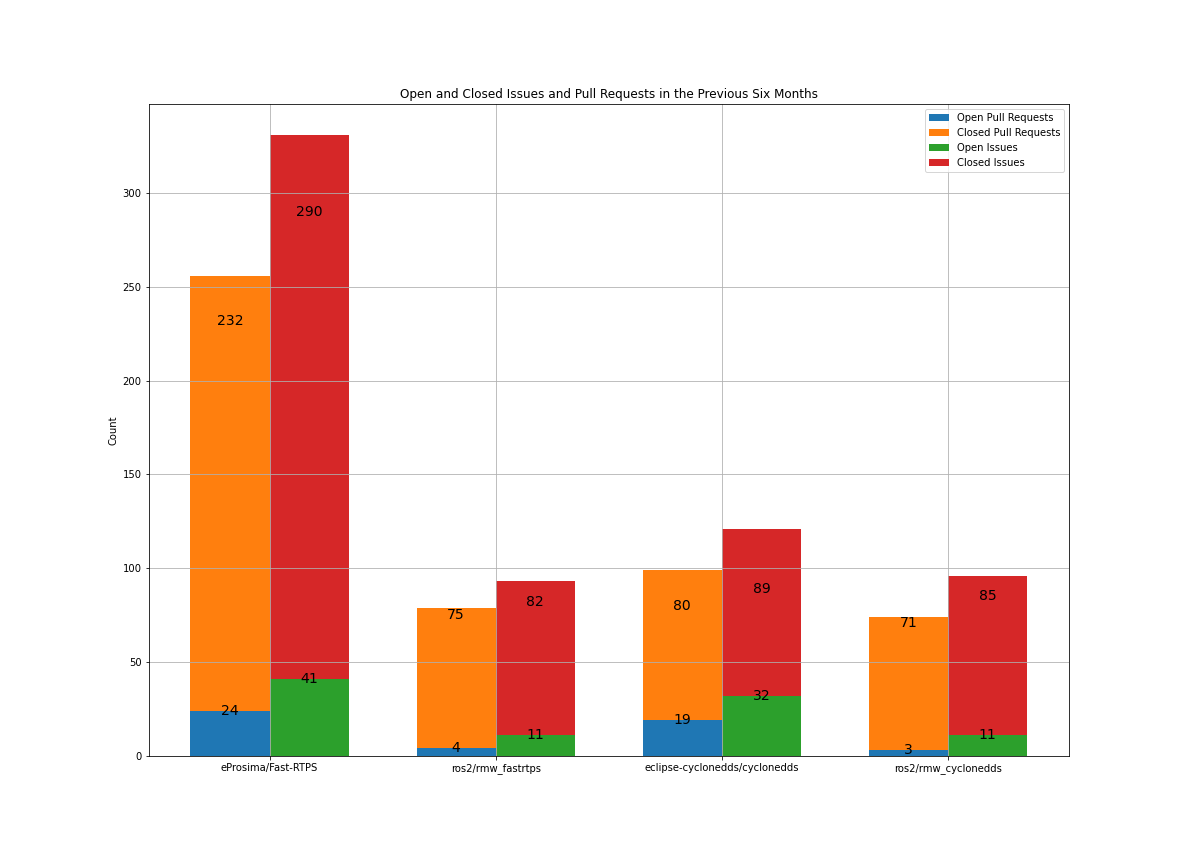
4.2.1 Open and Closed Pull Requests in the Previous Six Months
The following plot gives the open and closed issues and pull requests broken down by both DDS implementation and RMW implementation.
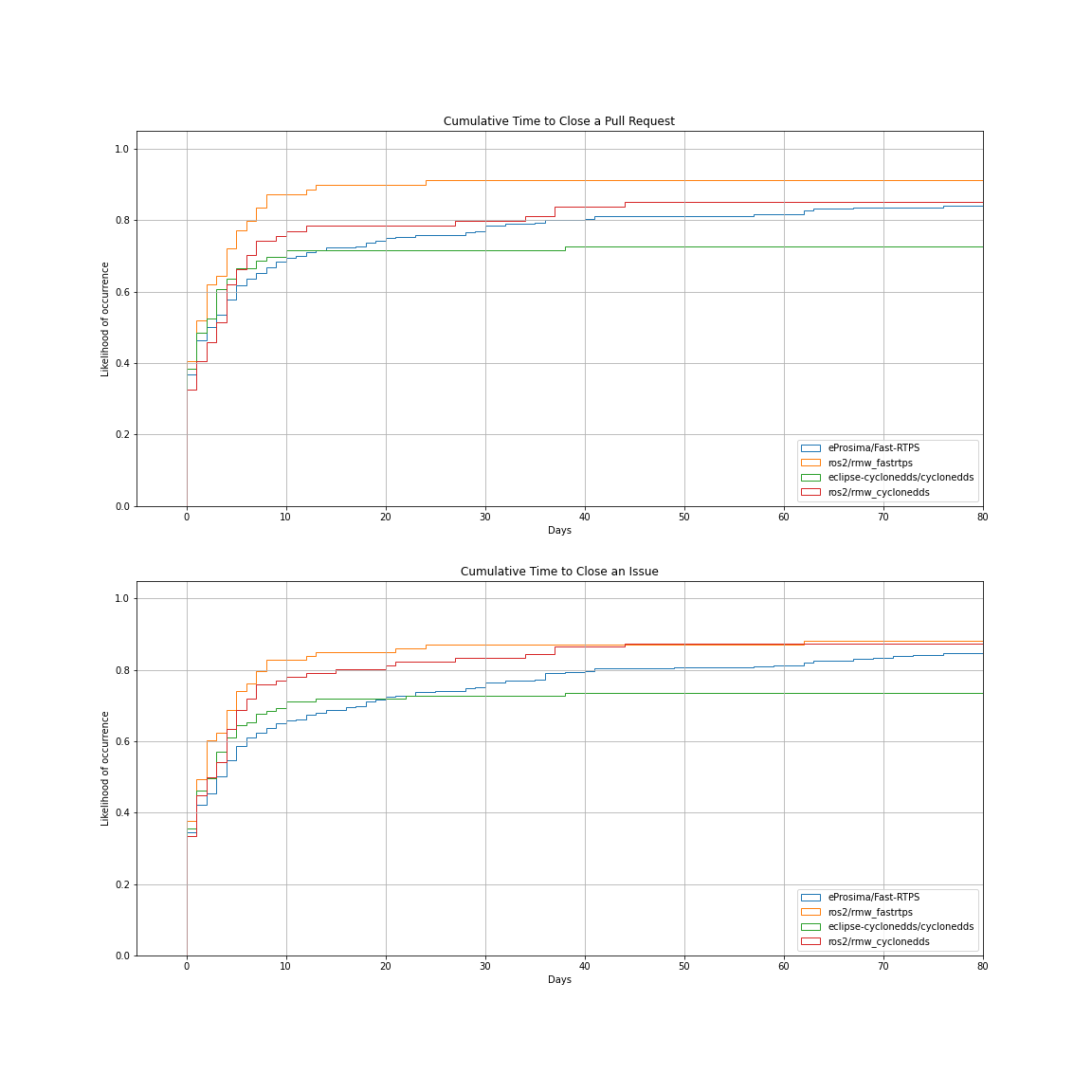
4.2.2 Cumulative Time to Close Pull Requests and Issues
These cumulative histograms give the percentage of issues and pull requests closed within a certain time frame over the 90 day sample period.
4.3 GitHub Metrics Discussion
Generally, for the six month period sampled, both vendors are doing a great job responding to both issues and pull requests. In terms of RMW layers the vendors have only small differences, with Fast RTPS being slightly faster closing issues and tickets for their RMW layer. Fast RTPS also appears to be under heavier development with almost three times the number of pull requests during the previous six months. It is unclear if this is caused by an increased number of ROS users, increased feature deployment, or addressing bugs and issues.
5. REP-2004 Code Quality Metrics
5.1 Overview and Description
Code quality is an important metric for project health. ROS 2 has defined various levels of package quality in REP-2004. Declaring a package to be in one of those quality levels means that it meets all of the requirements for that particular quality level. The quality level of each of the middlewares and their RMW implementation is summarized below. For more details, the reader is encouraged to look at the corresponding source repository for each middleware or RMW, where the quality level is declared in a file named QUALITY_DECLARATION.md or similar.
5.2 Results
| Package/Quality Metric | Cyclone DDS | rmw_cyclonedds | Fast RTPS | rmw_fastrtps |
|---|---|---|---|---|
| Current Quality Level | 3 | N/A | 2 | 2 |
| 1. Version Policy | 1. follows semver by major 0 is stable 2. current version is stable 3. dds_ or DDS_ symbols are public API, others may change4. no major releases in stable allowed 5. no major releases in stable allowed 6. no major releases in stable allowed |
N/A | 1. follows semver 2. current version is stable 3. API documentation available 4. no major releases in stable allowed 5. only minor releases break ABI 6. N/A |
1. follows semver 2. current version is stable 3. public API is in the headers 4. no major releases in stable allowed 5. no major releases in stable allowed 6. no major releases in stable allowed |
| 2. Change control | 1. changes must be in PR 2. DCO required 3. one review for merge (except when no reviewers available 4. CI required to pass 5. documentation required |
N/A | 1. changes must be in a PR 2. DCO required 3. at least one review required for merge 4. CI required to pass 5. documentation required |
1. changes must be in PR 2. DCO required 3. at least one review required for merge 4. CI required to pass 5. documentation required |
| 3. Documentation | 1. no high-level/concept documentation 2. API docs are embedded in the code 3. Eclipse Public License 2.0/Eclipse Distribution License 1.0 4. copyright statement included with the code |
N/A | 1. all features are documented 2. API reference is hosted at readthedocs 3. Apache 2.0 license 4. copyright statement included with the code |
1. all features are documented 2. API docs are embedded in the code 3. Apache 2.0 license 4. copyright statement included with the code |
| 4. Testing | 1. system tests cover features 2. tests cover all of the public API 3. line coverage should increase with changes 4. no performance tests 5. uses coverity for static analysis |
N/A | 1. simulation tests cover features 2. tests cover typical usage of public API 3. best-effort line coverage increase with changes 4. automatic performance test on changes 5. uses linters, but only for new code |
1. system tests cover features 2. tests cover all of the API 3. line coverage should increase with changes 4. no performance tests 5. uses standard ROS linters and tests |
| 5. Dependencies | 1. no ROS dependencies 2. no ROS dependencies 3. OpenSSL external dependency |
N/A | 1. no ROS dependencies 2. no ROS dependencies 3. libasio, libtinyxml2, Fast CDR, foonathan_memory, and OpenSSL* external dependencies |
1. all direct runtime ROS deps at some level 2. no optional direct runtime ROS deps 3. Fast CDR/Fast RTPS claim to be at QL 2 |
| 6. Platform | 1. supports all ROS 2 Tier 1 platforms | N/A | 1. supports all ROS 2 Tier 1 platforms | 1. supports all ROS 2 Tier 1 platforms |
| 7. Security | 1. conforms to REP-2006 | N/A | 1. Vulnerability disclosure policy | 1. Conforms to REP-2006 |
* OpenSSL dependency for Fast RTPS is optional, but used in ROS 2.
5.3 Discussion
Cyclone DDS is missing a quality declaration making it difficult to perform an apples to apples comparison between the two. Under most of the categories for the parts that are documented each implementation are comparable. Despite this there is an appreciable difference as Cyclone DDS is currently declared as quality level 3, and Fast RTPS is rated as quality level 2.
6. User Survey Results
6.1 Overview and Description
The final component of this document is a user survey on ROS user’s feelings about their selected RMW implementation conducted between September 17th and October 16th 2020. The survey was posted to ROS Discourse and provided ROS 2 users with a chance to rate the performance of their RMW as well as give a narrative description of their experience. In conjunction with this evaluation data we also asked participants to provide basic demographic data and perform a self assessment of their skills. In total there 96 responses with 31 users reporting that they use Cyclone DDS RMW and 60 users reporting they use Fast RTPS RMW. All of the respondents were ROS 2 users with nearly three quarters of them presently working with ROS 2 Foxy. The users sampled come from a wide variety of backgrounds, industries and work on a variety of different projects.
In the following section we summarize the data and where possible provide the descriptive statistics for both RMWs as well for the ROS community. Section 5.1.1 summarizes the questions given to participants that are referenced by the plots in 5.2. There is a summary of the results in 5.3 with a selection of user narrative responses included in section 5.4.
6.1.1 Survey Question Summary
Survey participants were asked a total of nineteen questions related to their RMW experience, which each of the questions listed below along with a question number to reference them in the graphs in section 5.2. Survey participants were allowed to respond with one of the following: “Strongly Agree”, “Agree”, “Neutral”, “Disagree”, “Strongly Disagree”, and “Not Applicable”. For plotting the results the written scores were translated to numerical values with, “Strongly Agree” being given a score of 5, and “Strongly Disagree” being given a score of 1. Users who selected “Not Applicable” were not included in the final results.
Full List of Survey Questions
- Q1: My current RMW worked out of the box for my application.
- Q2: I understand how RMWs work.
- Q3: I am capable of changing my RMW easily.
- Q4: I would/have considered changing my RMW implementation.
- Q5: Open Robotics provides sufficient information for me to make a sound RMW selection.
- Q6: My current RMW implementation provides sufficient support.
- Q7: My current RMW implementation provides sufficient documentation.
- Q8: My current RMW implementation provides sufficient debugging tools.
- Q9: My current RMW implementation provides sufficient features for my application.
- Q10: My current RMW implementation provides sufficient performance for my application.
- Q11: I am considering or have considered changing my current RMW implementation due to technical challenges.
- Q12: DDS/RMWs have improved the overall ROS experience.
- Q13: I would advocate for my current RMW to be the default ROS 2.
- Q14: I would recommend my current RMW to a friend.
- Q15: My RMW interoperates well with other systems.
- Q16: Based on the out-of-the-box experience I would recommend ROS2 Foxy to a friend.
- Q17: ROS should continue to use DDS as the default RMW implementation.
- Q18: I consider my current RMW implementation robust, reliable, and ready for production.
6.2 RMW User Survey Results
6.2.1 Survey Participant Demographic Information
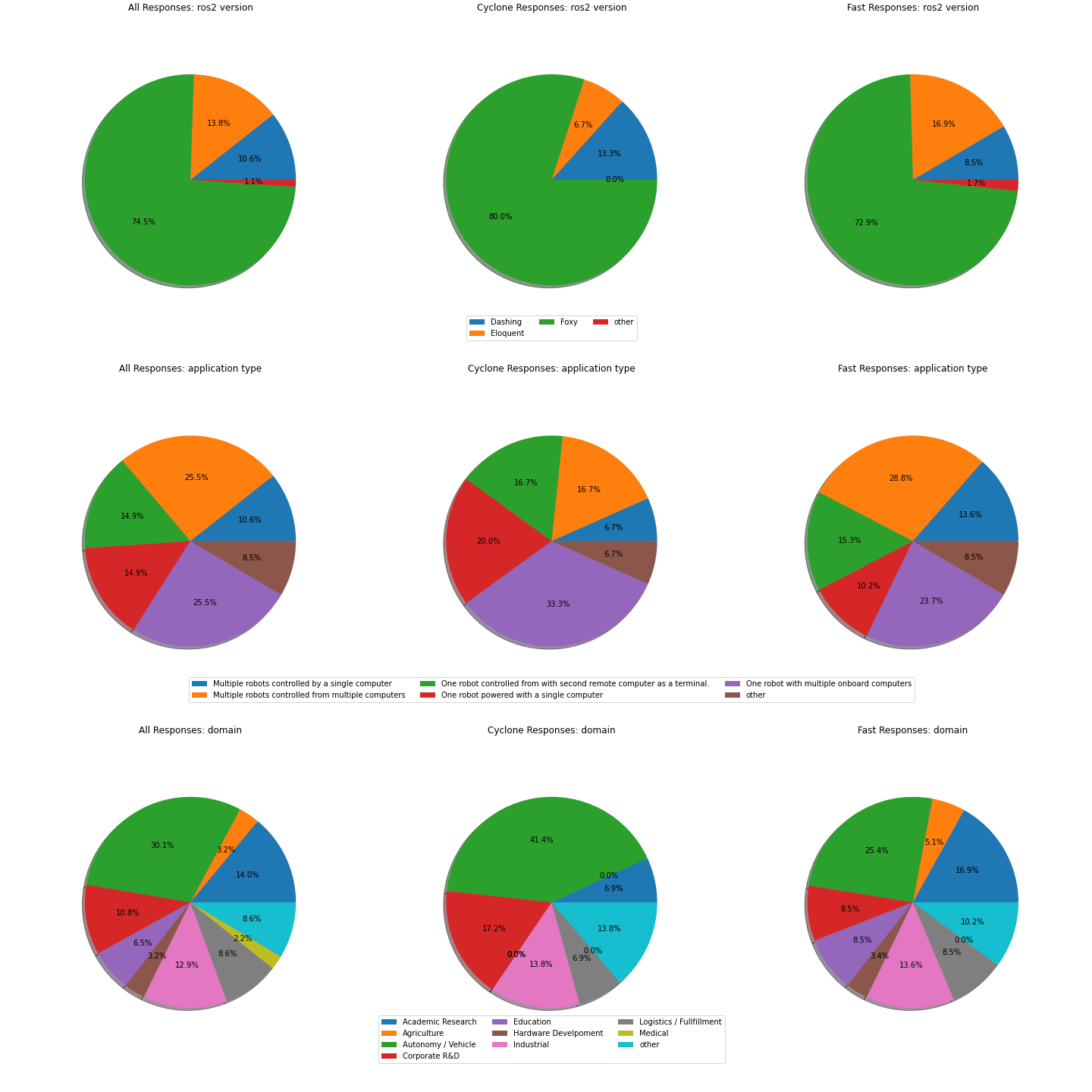
Before asking the general survey questions we also asked for some basic demographic data from participants. The plot below breaks the data down between the two Tier 1 RMW vendors. The data shows that approximately three quarters of participants are using ROS 2 Foxy. Of those users there is a good distribution of application types (a proxy for network topology) and application domain. As such we don’t believe that the survey data is unfairly biased towards a particular application type or domain.
6.2.2 Survey Participant Skill Self Assessment
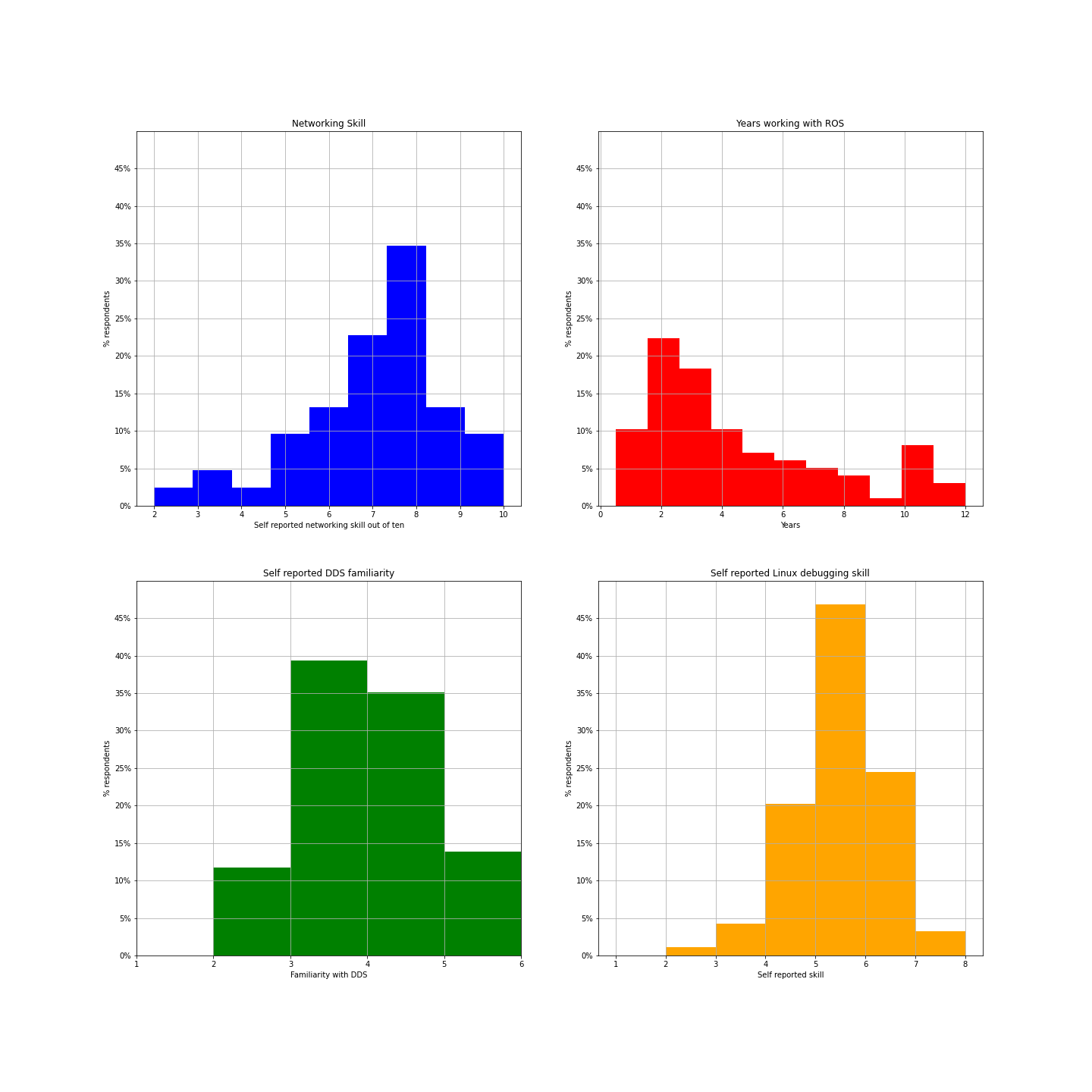
Survey participants were also asked to report their skill level in a variety of domains. Our goal was to verify that we sampled a wide variety of skill levels and captured both the experience of the novice user and the professional.
6.2.3 Survey Response Data by RMW
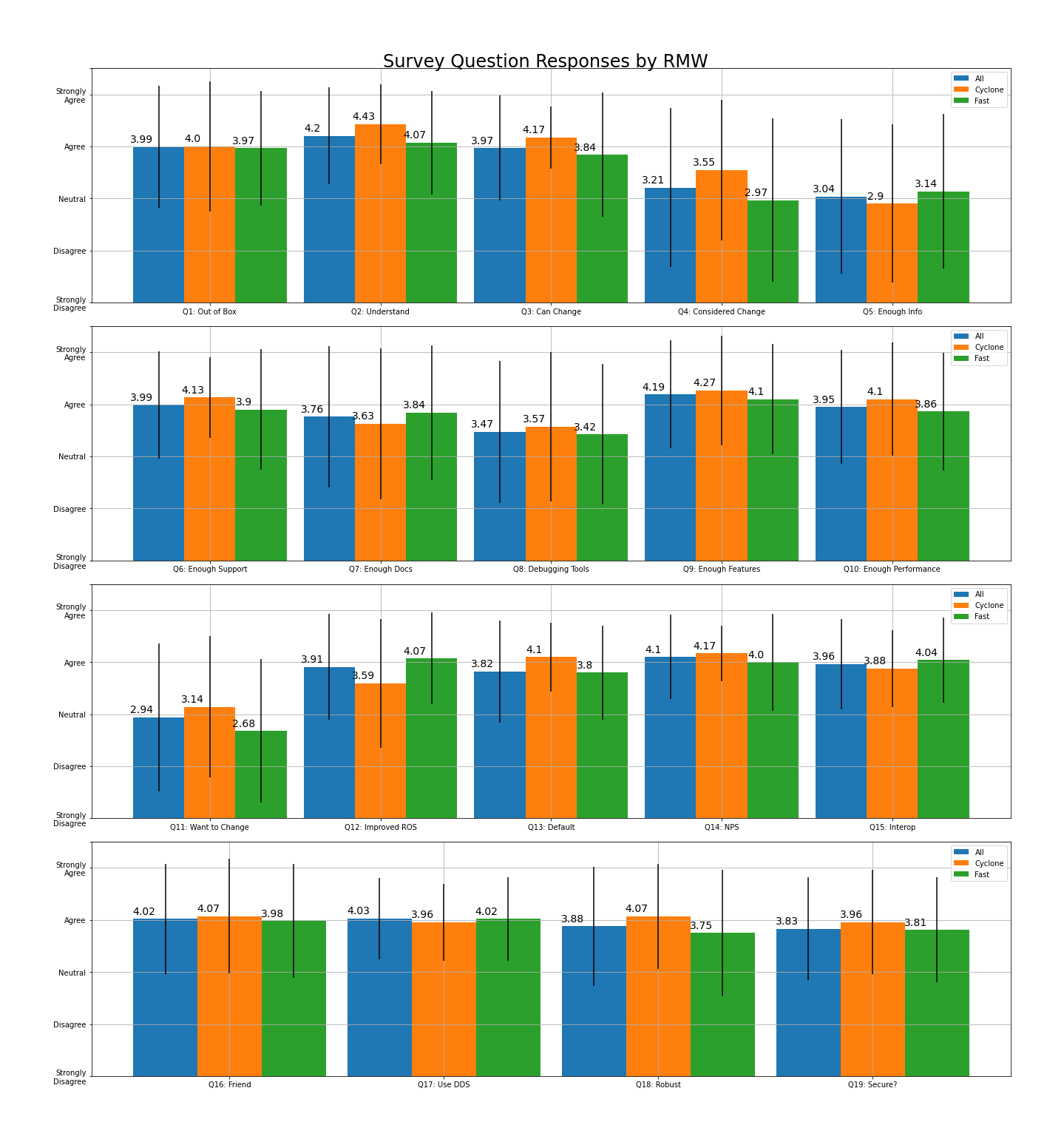
The following plot gives the results for the questions outlined in section 6.1.1. The error bars give the first standard deviation of the results. We report the dataset mean along with values for Fast RTPS and Cyclone DDS users. For most questions the values from Cyclone DDS users are higher.
6.2.4 Survey Question Drill Down 1
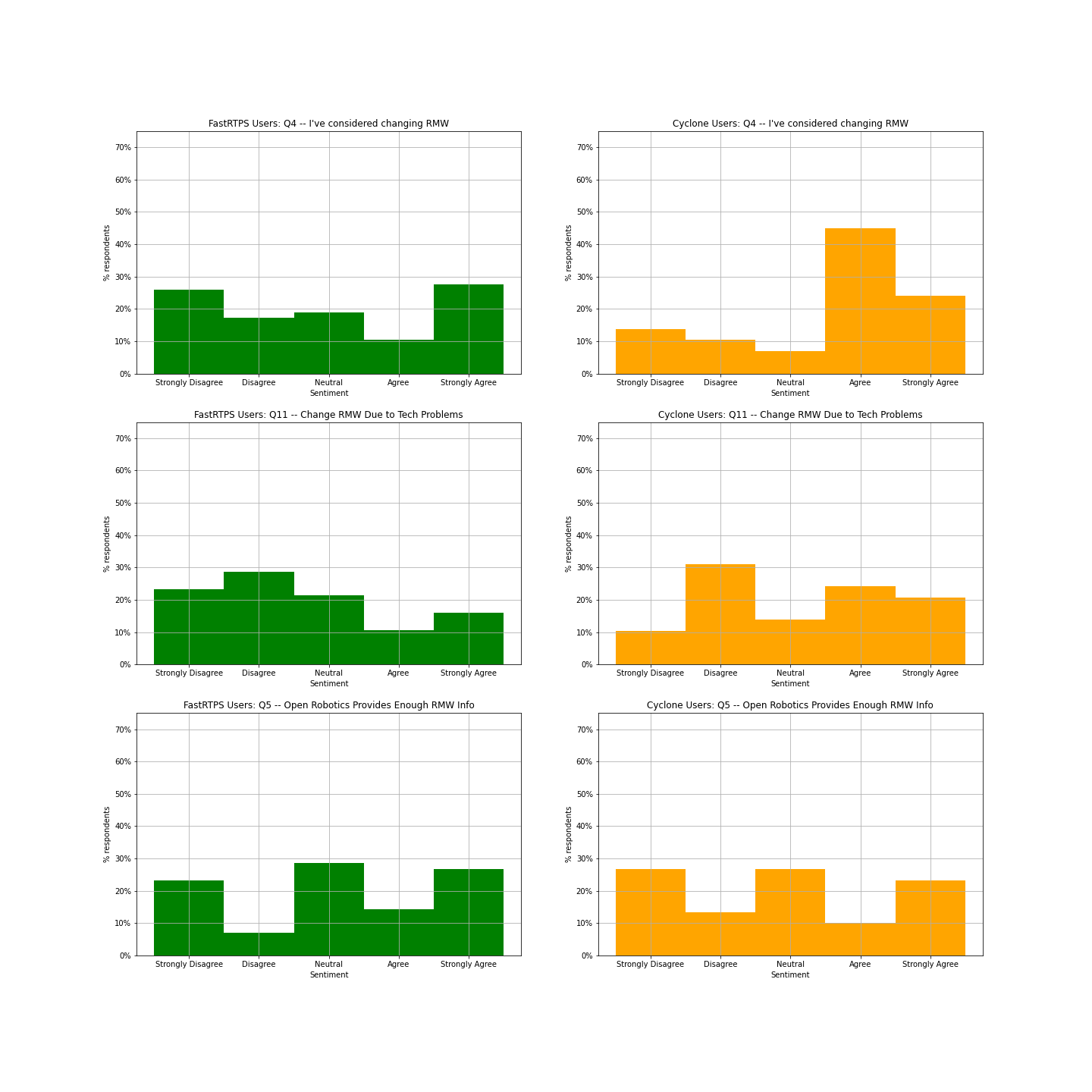
This plot drills down for questions four, five, and eleven to show the distribution of responses.
- Q4: I would/have considered changing my RMW implementation.
- Q11: I am considering or have considered changing my current RMW implementation due to technical challenges.
- Q5: Open Robotics provides sufficient information for me to make a sound RMW selection.
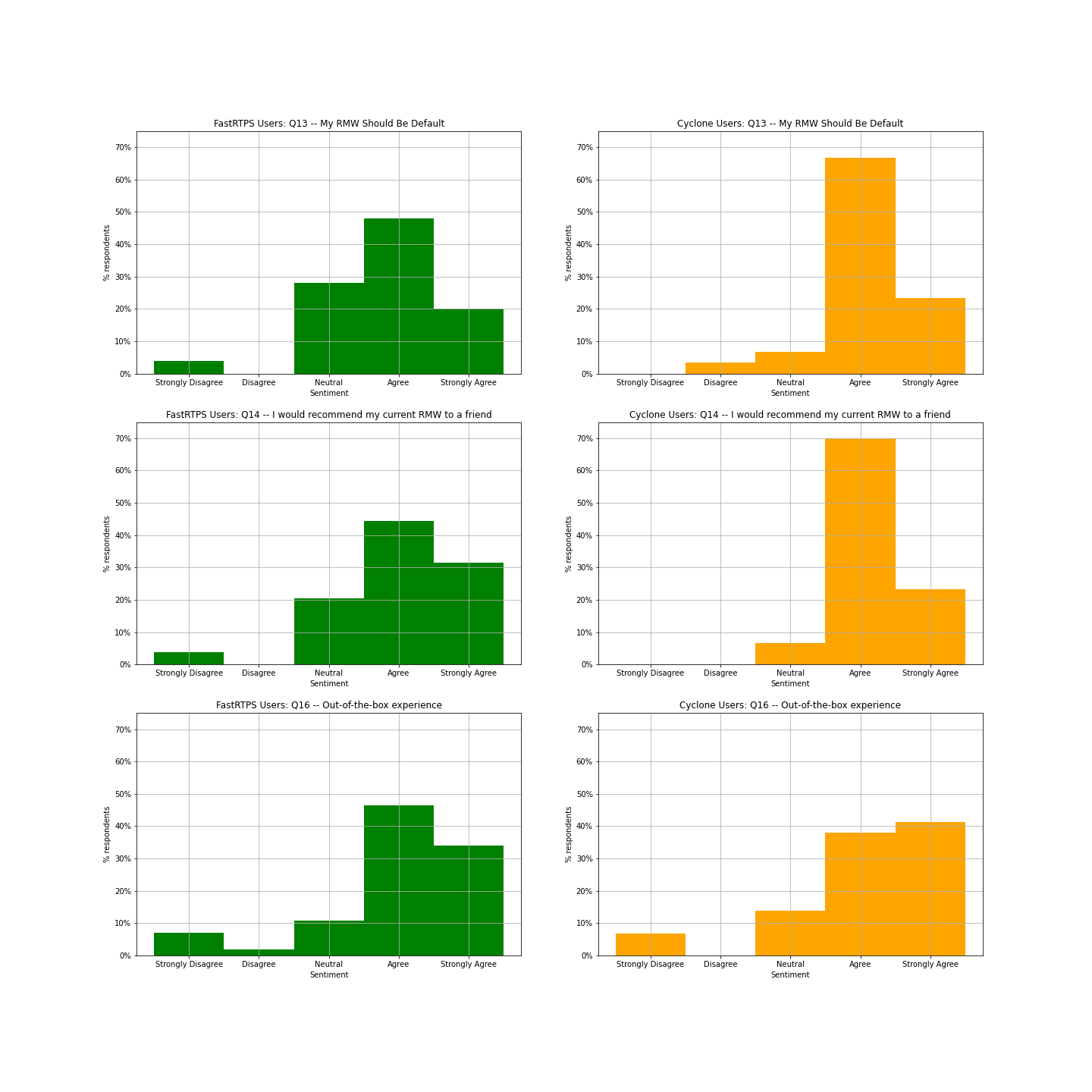
6.2.5 Survey Question Drill Down 2
This plot drills down for questions four, five, and eleven to show the distribution of responses.
- Q13: I would advocate for my current RMW to be the default ROS 2.
- Q14: I would recommend my current RMW to a friend.
- Q16: Based on the out-of-the-box experience I would recommend ROS2 Foxy to a friend.
6.3 Survey Discussion
We feel that we were able to collect a large and representative sample of the ROS community for this survey with a sufficient number of users for each RMW included in the final report. The respondents to the survey represent a wide swath of ROS 2 users with the preponderance of responses coming from ROS 2 Foxy Fitzroy users. These respondents reported a wide range of skill levels and varying degrees of competency in debugging, networking, and ROS development skills. What is remarkable about the responses is how uniform they were on most questions relating to their selected RMW vendor. The difference between most of the responses varies by no more than 5% for most of the questions.
Questions one, two, and three are leader questions that help us understand the ROS 2 community’s understanding of ROS middleware. By and large ROS 2 users, using both RMWs, say that they understand how RMWs work, how to change them, and that their current RMW worked out of the box for them. However, Cyclone DDS RMW users are slightly more likely to understand RMWs. Question four asks if a given user has changed their RMW, and unsurprisingly Cyclone DDS RMW users are much more likely to have considered changing their RMW. Question five, “Does Open Robotics provide sufficient information to make a sound RMW selection” received on average a neutral response indicating we could do more to support the community. For questions six, seven, and eight, most users, from both RMWs, feel they have sufficient support, documentation, and debugging tools, with Cyclone DDS users believing they have slightly better support and debugging tools, and Fast RTPS users feeling like they have better documentation. Question nine asks if the selected RMW has sufficient features, and Cyclone DDS RMW users believe it performs slightly better in this category.
Question ten shows that Cyclone DDS RMW users believe that they have sufficient performance for their application, but the difference is small, only 6%. Question eleven, “I am considering changing or have changed my RMW due to technical challenges” is interesting because the responses are nearly uniform between the two RMWs. In question twelve we find that ROS users generally agree that DDS RMWs have improved the overall ROS experience; but those who have had issues and had to switch to Cyclone having a less rosy view of DDS in general. Question thirteen asks respondents if they would recommend their RMW as the default, to which Cyclone DDS RMW users have a more positive response. Similarly, question fourteen asks is the user would recommend their RMW to a friend, and a slightly higher percentage of Cyclone DDS RMW users would do so. This question is very similar to the “net promoter score” used by product managers to understand customer attitudes towards a product. Most of the remaining questions are fairly similar results except for question eighteen, “I consider my current RMW implementation robust, reliable, and ready for production.” Question eighteen had a slightly higher positive response rate from Cyclone DDS RMW users than Fast RTPS users.
All in all, Cyclone DDS RMW rated more favorably among its users, but only very slightly so.
6.4 Survey Narrative Responses
We provided a space in the user survey for respondents to communicate their feelings about their preferred middleware to the TSC, While not a formal evaluation, the experience of individuals is worth considering given our limited testing capabilities. The full list of responses will be provided to the TSC if requested. We have included a few of these excerpts in this document to capture the spirit of all the responses.
6.4.1 Cyclone DDS User Responses
“CycloneDDS has been more consistent with outputting the expected
performance. The test we ran show that in many different scenarios CycloneDDS is
able to work without a hitch, while Fast DDS's performance outperforms
CycloneDDS in some scenarios it completely fails in others (100+ nodes in a
distributed setup over VPN).”
-- A ROS 2 Foxy user
“Right now, I would advocate for Cyclone DDS, with FastDDS still being a
relatively close second. I think FastDDS works for most users in most use-cases,
particularly users who may not be working in commercial/industrial environments,
such as university labs or personal projects, but I have had both performance
and reliability issues with it relating to discovery, implementation of DDS
features, sending of large-data, and more, which Cyclone fully resolved for
me. License-wise, they are both agreeable options.”
-- A ROS 2 Foxy user
“CycloneDDS is the best. Only CycloneDDS can remote use rviz2 over Wi-Fi to
control the AMR doing navigation with Navigation2.”
-- A ROS 2 Foxy user
“I would definitely advocate for a default RMW (and even further for only a
single supported RMW). As for which one, I don't have a strong opinion, but I
would be biased to cyclonedds simply because they seem extremely willing to
engage with the community and to be responsive to its needs.”
-- A ROS 2 Foxy user
6.4.2 Fast RTPS Narrative Responses
“I am lacking the technical knowledge of the RMW details for a decision like that.
All I can say is that the default didn't work well at all for our use case.”
-- A ROS 2 Eloquent user
“I would vote positively for the current one, in fact I'have gone through their
documentation (Fast DDS, XRCE DDS and Integration Service) besides the official
ROS documentation. To me, the integration service is being quite useful to promote
the acceptance of ROS2 features. I am familiar with this stuff and I am not willing
to experience changes on this part of my systems.”
-- A ROS 2 Foxy user
“Cannot advocate for a particular RMW, as we only used the default one. However, we
never had any trouble with it, and we prefer it that way. Should the default RMW change,
we would consider configuring our solution to use the current one, as we already know it
works for us.”
-- A ROS 2 Foxy user
“I advocate for FastDDS (formerly FastRTPS) from eProsima. I think their implementation
works great for most of the situations. Also, they have a full and large team dedicated
to develop and improve it. Finally, they have specialised services for companies that need
extra development on top of that. And it is open source”
-- A ROS 2 Eloquent user