ROS Concepts and Design Patterns
As we said, learning about ROS is similar to learning about an automobile. In fact, a car is a lot like a robot (and sometimes it really is a robot; see the large and active self-driving vehicle industry). A modern automobile comprises many parts that are connected to each other. The steering wheel is connected to the front axle, the brake pedal is connected to the brake calipers, the oxygen sensor is connected to the fuel injectors, and so on. From this perspective, a car is a distributed system: each part plays a well-defined role, communicating (whether electrically or mechanically) as needed with other parts, and the result of that symphony-like coordination is a working vehicle.
A key philosophical tenet of ROS is that robotics software should also be designed and developed as a distributed system. We aim to separate the functions of a complex system into individual parts that interact with each other to produce the desired behavior of that system. In ROS we call those parts nodes and we call the interactions between them topics (and sometimes services, but we will get to that).
The ROS Communication Graph
Imagine we are building a wheeled robot that chases a red ball. This robot needs a camera with which to see the ball, a vision system to process the camera images to figure out where the ball is, a control system to decide what direction to move, and some motors to move the wheels to allow it to move toward the ball. Using ROS we might construct the system like so:
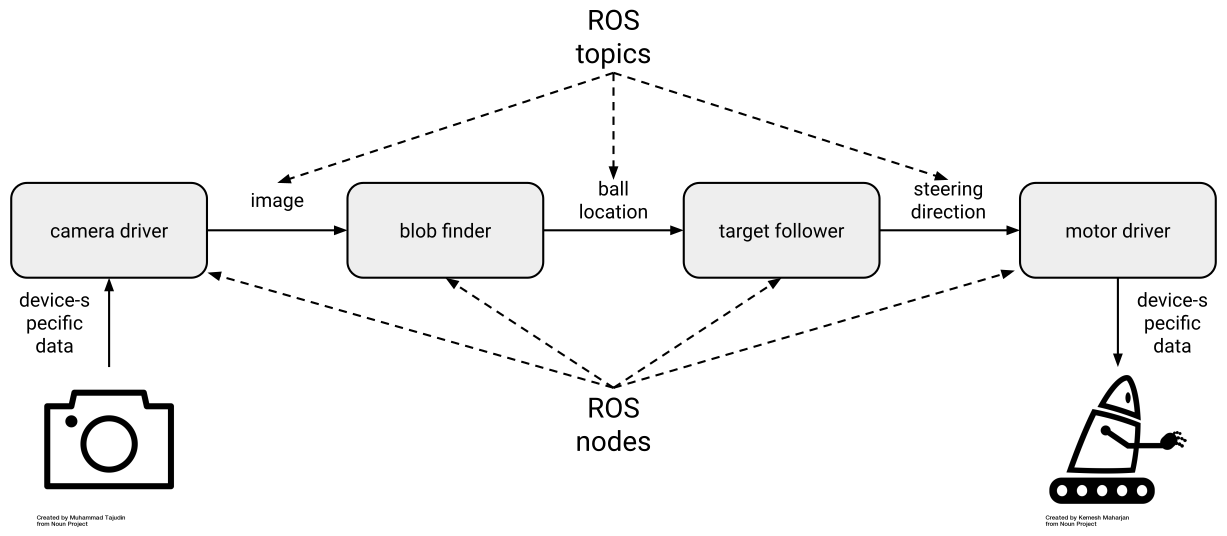
This design separates the software into four ROS nodes: two device drivers and two algorithms. Those nodes communicate with each other as shown, via three ROS topics. We call this structure a ROS communication graph: the nodes are the graph vertices and the topics are the graph edges. You can tell a lot about a ROS system by examining its communication graph.
The camera driver node is responsible for handling the details of interacting with the physical camera, which might happen through a custom USB protocol, through a vendor-provided library, or in some other way. Whatever those details, they are encapsulated inside the camera driver node, which presents a standard topic interface to the rest of the system. As a result, the blob finder node does not need to know anything about the camera; it simply receives image data in a standard format that is used for all cameras in ROS. The output of the blob finder is the detected location of the red ball, also in a standard format. Then the target follower node can read in the ball location and produce the steering direction needed to move toward the ball, again in a standard format. Finally, the motor driver node's responsibility is to convert the desired steering direction into the specific instructions necessary to command the robot's wheel motors accordingly.
Publish-Subscribe Messaging: Topics and Types
With the example of the ball-chasing robot in mind, we can add some terminology to describe what is happening as the system operates. First, the ROS communication graph is based on a well-known pattern called publish-subscribe messaging, or simply pub-sub. In a pub-sub system, as the name implies, data are sent as messages from publishers to subscribers. A publisher may have zero, one, or multiple subscribers listening to its published messages. Messages may be published at any time, making the system asynchronous.
In ROS, nodes publish and subscribe via topics, each of which has a name and a
type. A publisher announces that it will be publishing data by advertising a
topic. For example, the camera driver node may advertise a topic named /image
with type sensor_msgs/Image. If the blob finder node subscribes to a topic
with the same name and type, then the two nodes find each other and establish a
connection over which image messages can get from the camera driver to the blob
finder (the nodes find each other and establish those connections in a process
called discovery, which will be covered in detail later in this book). Each
message that flows across the /image topic will be of type
sensor_msgs/Image.
A single node can be (and often is) both a publisher and a subscriber. In our example, the blob finder subscribes to image messages and publishes ball location messages. Similarly the target follower subscribes to ball location messages and publishes steering direction messages.
A topic's type is very important. In fact, taken together, the ROS types are
among the most valuable aspects of the entire platform. First, a type tells you
the syntax: which fields, of which types, does the message contain? Second, it
tells you the semantics: what do those fields mean and how should they be
interpreted? For example, a thermometer and a pressure sensor might produce what
appear to be the same data: a floating-point value. But in ROS, a well-designed
thermometer driver node would publish one clearly defined type (say,
sensor_msgs/Temperature), while a pressure sensor driver node would publish
another (say, sensor_msgs/FluidPressure).
We always advise the use of semantically meaningful message types.
For example, ROS provides simple message types like std_msgs/Float64, which
contains a single 64-bit floating-point field called data. But you should only
use that sort of generic type for rapid prototyping and experimenting. When you
build a real system, even if something like std_msgs/Float64 could get the job
done on syntax, you should instead find or define a message that also matches
the semantics of your application.
Why Publish-Subscribe?
Given that it comes with additional complexity (nodes, topics, types, etc.), it is reasonable to ask why ROS follows the pub-sub pattern. After more than a decade of building and deploying ROS-based robot systems, we can identify several key benefits:
- Substitution: If we decide to upgrade the robot's camera, we need only modify or replace the camera driver node. The rest of the system never knew the details of the camera anyway. Similarly, if we find a better blob finder node, then we can just swap it in for the old one and nothing else changes.
- Reuse: A well-designed blob finder node can be used today on this robot to chase the red ball, then reused tomorrow on a different robot to chase an orange cat, and so on. Each new use of a node should require only configuration (no code) changes.
- Collaboration: By cleanly separating concerns between nodes, we let our blob finder expert do their work independently of the target follower expert, with neither of them bothering the device driver expert. It is often the case that a robot application requires the combined expertise of many people, and it would be difficult to overstate the importance of ensuring that they can each contribute confidently and efficiently.
- Introspection: Because the nodes are explicitly communicating with each other via topics, we can listen in. So when the robot fails to chase the red ball, and we think that the problem is in the blob finder, we can use developer tools to visualize, log, and play back that node's inputs and outputs. The ability to introspect a running system in this way is instrumental to being able to debug it.
- Fault tolerance: Say that the target follower node crashes because of a bug. If it is running in its own process, then that crash will not bring down the rest of the system, and we can get things working again by just restarting the target follower. In general with ROS we have the choice to run nodes in separate processes, which allows for such fault tolerance, or run them together in a single process, which can provide higher performance (and of course we can mix and match the two approaches).
- Language independence: It can happen that our blob finder expert writes their computer vision code in C++, while our target follower expert is dedicated to Python. We can accommodate those preferences easily by just running those nodes in separate processes. In ROS, it is perfectly reasonable, and in fact quite common, to mix and match the use of languages in this way.
Beyond Topics: Services, Actions, and Parameters
Most ROS data flows over topics, which we introduced in the previous sections. Topics are best for streaming data, which includes a lot of the common use cases in robotics. For example, going back to our ball-chasing robot, most cameras will naturally produces a stream of images at some rate, say, 30Hz. So it makes sense for the camera driver to publish the ROS messages containing those images just as soon as they're received. Then the blob finder will be receiving image messages at 30Hz, so it might as well publish its ball location messages at the same rate, and so on, through the target follower to the motor driver. We might say that such a systems is clocked from the camera: the data rate of the primary sensor, the camera in this case, drives the rate of computation of the system, with each node reacting in to receipt of messages published via topics by other nodes. This approach is fairly common and is appropriate for systems like our ball-chasing robot. There is no reason to do any work until you have a new camera image, and once you have one you want to process it as quickly as possible and then command an appropriate steering direction in response.
(We are making various simplifying assumptions, including that there is sufficient computational capacity to run all the nodes fast enough to keep up with the camera's data rate; that we do not have a way to predict where the ball is going in between camera frames; and that the motors can be commanded at the same rate the camera produces images.)
Services
So topics get the job done for the basic ball-chasing robot. But now say that we want to add the ability to periodically capture an ultra-high-resolution image. The camera can do it, but it requires interrupting the usual image stream that we rely on for the application, so we only want it to happen on demand. This kind of interaction is a poor fit for the publish-subscribe pattern of a topic. Fortunately, ROS also offers a request-reply pattern in a second concept: services.
A ROS service is a form of remote procedure call (RPC), a common concept in distributed systems. Calling a ROS service is similar to calling a normal function in a library via a code API. But because the call may be dispatched to another process or even another machine on the network, there is more to it than just copying pointers around. Specifically, a ROS service is implemented using a pair of ROS messages: a request and a reply. The node calling the service populates the request message and sends it to the node implementing the service, where the request is processed, resulting in a reply message that is sent back.
We might implement the new high-res snapshot capability like so:
- Define a new service type. Because services are less widely used than
topics, there are relatively few "standard" service types predefined.
In our case, the new service's request message might include the desired
resolution of the snapshot. The request message could be a standard
sensor_msgs/Image. - Implement the service. In the camera driver, we would advertise the newly defined service so that when a request is received, the usual image-handling is interrupted temporarily to allow the device interaction necessary to grab one high-res snapshot, which is then packed into a reply message and sent back to the node that called the service.
- Call the service. In the target follower node, we might add a timer so that every 5 minutes, it calls the new service. The target follower would receive the high-res snapshot in response to each call, and could then, say, add it to a photo gallery on disk.
In general, if you have a need for infrequent, on-demand interactions among nodes, ROS services are a good choice.
Actions
Sometimes, when building robot control systems, there is a need for an interaction that looks like request-reply, but that can require a lot of time between the request and the reply. Imagine that we want to wrap up our ball-chasing control system into a black box that can be invoked as part of a larger system that makes the robot play football. In this case, the higher level football controller will periodically want to say, "please chase the red ball until you have it right in front of you." Once the ball is in front of the robot, the football controller wants to stop the ball-chasing controller and invoke the ball-catching controller.
We could achieve this kind of interaction with a ROS service. We could define a chase-ball service and implement it in the target follower. Then the football controller could call that service when it wants the ball chased. But ball-chasing may take quite some time to complete, and it may fail to complete. Unfortunately, after calling the chase-ball service, the football controller is stuck waiting for the reply, similar to the situation in which you call a long-running function in code. The football controller does not know how well (or poorly) the chase is going, and it cannot stop the chase.
For such goal-oriented, time-extended tasks, ROS offers a third concept that is similar to services but more capable: actions. A ROS action is defined by three ROS messages: a goal, a result, and feedback. The goal, sent once by the node calling the action to initiate the interaction, indicates what the action is trying to achieve; for ball-chasing it might be the minimum required distance to the ball. The result, sent once by the node implementing the action after the action is complete, indicates what happened; for ball-chasing it might be final distance to the ball after the chase. The feedback, sent periodically by the node implementing the action until it is complete, updates the caller on how things are going; for ball-chasing it might be the current distance to the ball during the chase. In addition, actions are cancelable, so the football controller can decide to give up and move onto another tactic if the chase is taking too long or if the feedback messages are showing that there is little chance of success.
In general, if you want to support on-demand, long-running behaviors, ROS actions are a good choice.
Parameters
Any nontrivial system requires configuration, and ROS is no exception.
When we start our robot's motor driver node, how do we tell it to
connect to the motors via /dev/ttyUSB1? We do not want to hard-code
that information into the node, because on the next robot it might be
/dev/ttyUSB0 instead. ROS addresses such configuration needs via a
fourth concept: parameters. A ROS parameter is what you might expect:
a named, typed, place to store a piece of data. For example, the motor
driver node may define a parameter called serial_port with type
string. When it starts up, the node would use the value of that
parameter to know which device to open to get to the motor system.
ROS parameters can be set in a few ways:
- Defaults. A ROS node that uses a parameter must embed in its code some default value for that parameter. In the case that nothing else in the system sets the parameter value explicitly, the node needs some value to work with.
- Command-line. There is standard syntax for setting parameter values on the command-line when launching a node. Values set in this manner override defaults in the code.
- Launch files. When launching nodes via the
launchtool instead of manually via the command-line, you can set parameter values in the launch file. Values set in this manner override defaults in the code. - Service calls. ROS parameters are dynamically reconfigurable via a standard ROS service interface, allowing them to be changed on the fly, if the node hosting the parameters allows it. Values set in this manner override whatever previous values were set.
For most nodes, parameter management is relatively simple: define a
handful of parameters, each with a reasonable default; retrieve the
parameters' values at startup, which accounts for changes made via
command-line or launch file, then begin execution and disallow future
changes. This pattern makes sense for the motor driver, which needs to
know which /dev/ttyUSB device file to open at startup, and does not
support changing that setting later. But there are cases that require
more sophisticated handling. For example, the blob finder node may
expose as parameters a variety of thresholds or other settings that
configure how it identifies the red ball in images. These kinds of
settings can be changed on the fly, which the target follower might want
to do, based on how well the chase is going. In this case the blob
finder needs to be sure to use the latest values for its parameters,
knowing that they may have been changed by another node.
In general, when you want to store stable, but possibly changeable, configuration information in a node, ROS parameters are a good choice.
Asynchrony in Code: Callbacks
Throughout ROS, you will see a common pattern in the code, which is the use of callback functions, or simply callbacks. For example, when subscribing to a topic, you supply a callback, which is a function that will be invoked each time your node receives a message on that topic. Similarly, when you advertise a service, you supply a callback that is invoked when the service is called. The same goes for actions (for handling of goals, results, and feedback) and parameters (for handling of setting new values).
Programming with callbacks is not familiar to everyone. It differs from the
standard sequential presentation of programming, in which you write a main()
function that does A, then B, then C, and so on. By contrast, in ROS (and in
most systems that focus on data-processing and/or control), we follow an
event-based pattern. In this pattern, we do A whenever X happens, B whenever Y
happens, and so on.
A common structure for a ROS node is the following:
- Get parameter values. Retrieve the node's configuration, considering defaults and what may have been passed in from outside.
- Configure. Do whatever is necessary to configure the node, like establish connections to hardware devices.
- Set up ROS interfaces. Advertise topics, services, and/or actions, and subscribe to services. Each of these steps supplies a callback function that is registered by ROS for later invocation.
- Spin. Now that everything is configured and ready to go, hand control over to ROS. As messages flow in and out, ROS will invoke the callbacks you registered.
Following this structure, a main() function in a ROS node is often very
short: initialize and configure everything, then call a spin function to let
ROS take over. When you are trying to understand what is happening in a ROS
node, look in the callbacks; that is where the real work is happening.